
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Фундаментальные принципы построения САУ.Стр 1 из 7Следующая ⇒
Фундаментальные принципы построения САУ. Принцип разомкнутого управления (управление по входному воздействию).
Управляющее воздействие формируется только на основе задающего воздействия без учета внешних возмущений. Функциональная схема системы: ЗУ – задающее устройство, предназначено для формирования сигнала задающего воздействия. УУ – устройство управления, которое на основе задающего воздействия формирует управляющее воздействие u(t). Основное достоинство: простота конструкции. y(t)=f(g(t)); y(t)=f1(u(t), f(t)); u(t)=f2(g(t)) Основной недостаток системы: низкая точность, связанная с тем, что влияние возмущающих воздействий на выходную величину не контролируется. Область использования: работа при стабилизированных внешних воздействиях. Например, лабораторные измерительные приборы, системы охранной и пожарной сигнализации, система стабилизации скорости вращения двигателя постоянного тока. Зарисуем последний пример:
Принцип компенсации. Из числа возмущающих воздействий выбирается одно или несколько доминирующих, их изменения измеряются и результаты измерения используются в качестве дополнительных воздействий на объект.
Основная область использования: системы с термокомпенсацией (Система автоматической компенсации длины маятника). Достоинство: точность выше по сравнению с разомкнутым управлением. Недостаток: при большом количестве возмущающих воздействий система становится сложной в настройке и обслуживании. Принцип управления по отклонению (принцип обратной связи).Принцип Ползунова-Уатта. В таких системах путем преобразования регулируемой величины формируют сигнал обратной связи, который сравнивают с сигналом задающего воздействия. Если в результате сравнения обнаруживается отклонение этих величин (ошибка рассогласования), регулятор работает на устранение этой ошибки.
ЧЭ – чувствительный элемент для преобразования регулируемой величины в форму, удобную для сравнения с задающим воздействием. СУ – сравнивающее устройство, предназначено для получения ошибки рассогласования: x(t)=g(t)-yx(t) Помимо операции сравнения сравнивающее устройство может изменять масштаб или природу ошибки рассогласования. В этом случае: x(t)=Ксу(g(t)-yx(t)) Системы с обратной связью имеют наибольшую точность регулирования, поэтому по такому принципу строится большинство систем. САР частоты вращения двигателя постоянного тока (пример):
!!! Чем выше скорость, тем выше сигнал обратной связи ТГ – тахогенератор(преобразовывает скорость вращения в напряжение). Δ U=UЗ-UТГ ТГ- это ЧЭ, Итт- сигнал обратной связи Достоинства: высокая точность; Недостатки: введение обратной связи в систему замедляет ее работу и ухудшает динамические свойства.
Типовая функциональная схема САР. Большая часть САР строится по принципу обратной связи.
ДР – датчик регулятора ЗУ – задающее устройство; СМ – сервомеханизм; СУ – основное сравнивающее устройство (для получения сигнала ошибки рассогласования). ПЭ – преобразовательные элементы (для преобразования уровня или физической природы сигналов в различных точках системы). Могут находится в любом месте схемы в любом количестве. У – усилитель (для усиления ошибки рассогласования с целью повышения чувствительности системы). ОР - объект регулирования; ИУ – исполнительно устройство (для формирования управляющего воздействия u(t) и находящееся непосредственно перед объектом. Система состоит из ОР и регулятора, в состав которого входят датчик, который предназначен для формирования ошибки ДР на основе которой сервомеханизм формирует управляющее воздействие. Для системы в целом и ее составляющих входными и выходными сигналами будут являться следующие параметры:
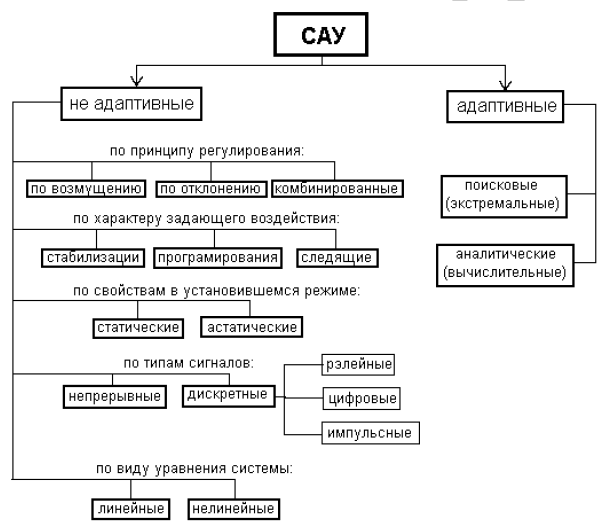
Классификация САР. Неадаптивные системы — это системы, в которых не предусмотрена автоматическая настройка при изменении характеристик внешних воздействий или параметров самой системы с целью обеспечения оптимального процесса управления. Настройку такой системы обычно -выполняет человек. Адаптивные системы — это системы, которые в зависимости от условий работы (характеристик воздействий и параметров самой системы) изменяют свою настройку, обеспечивая для каждой совокупности условий наивыгоднейший режим работы. Линейные – для которых справедлив принцип суперпозиции: Реакция обьекта на сумму входных воздействий равна сумме реакций обьекта на каждое воздействие в отдельности. Л (X1 + X2 + … + Xn) = Л (X1) + Л (X2) + … + Л (Xn); Нелинейные – не справедлив закон суперпозиции; Непрерывные – аналоговые сигналы (ток, напряжение) Дискретные (импульсные, цифровые, релейные). Выходные устройства – механическое реле, твердотельное реле, симистор, тиристор, транзисторный ключ, интерфейс. Стабилизирующие – поддерживает регулируемый параметр на постоянном значении заданной точки. Программные –изменяет регулируемую величину в соответствии с функцией задания во времени – программные задатчики. Следящие – задача состоит в том, чтобы изменения регулируемой величины следили за изменениями другого параметра.
Стабилизирующие САР. Алгоритм функционирования заключается в поддержании выходной величины на постоянном уровне. Уравнение системы: y=c+kΔ x – для статического режима. с – константа, которая соответствует номинальному значению выходной величины; Δ x – ошибка рассогласования; k – коэффициент передачи системы. В идеале Δ x→ 0; y→ c. Пример: САР частоты вращения двигателя постоянного тока:
ω – частота вращения вала-регулируемая величина. Мс - момент нагрузки-возмущающее воздействие; Основной причиной отклонения ω является изменение момента нагрузки на валу двигателя и Uп. UТГ=КТГ·ω Напряжение рассогласования Δ U=UЗ-UТГ=UЗ-КТГ·ω В статическом режиме Δ U→ 0 и соответственно UЗ=КТГ·ω ω =UЗ/КТГ=С ω =UЗ/КТГ+ Δ U·Кy·Кq·КТГ Программные САР. Алгоритм функционирования заключается в изменении выходной величины по заранее заданному закону. Для этого в стабилизирующую систему добавляют дополнительный программный элемент, с помощью которого изменяют задающее воздействие по заданной программе. Функциональная схема такой системы выглядит следующим образом:
П – программный элемент. Может быть функцией F(z), где z – независимая переменная. Система регулирования температуры в закалочной печи (пример):
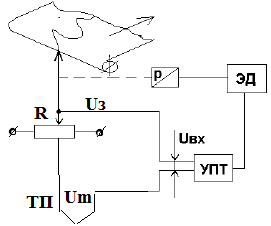
Следящие САР. Алгоритм функционирования заключается в изменении выходной величины по заранее неизвестному закону. В этом случае задающее воздействие формируется внешними условиями или оператором. В зависимости от физической природы различают: -системы воспроизводства угла; -частота вращения; -момента; -электрических величин. Система регистрации температуры (пример):
Когда t0=const(Um=Uз), Uвх=0, сигнал на выходе =0. Когда t0 изменен, изменен и Um, появляется Uвх которое усиливает и которое поднимает перо самописца.
I) позиционные звенья.
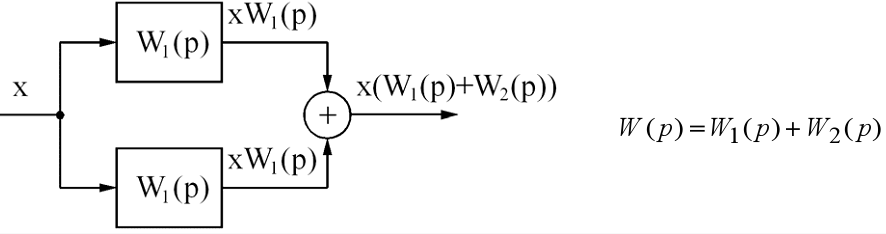
С(р) имеет нулевой порядок; y=k·x Примеры: рычаг, редуктор, делитель напряжения. Изодромные звенья. y=(k/p+k1)x=k/p·x+k1x; W(p)=k/p+k1=k/p·(Тр+1) Изодромное звено можно получить параллельным соединением интегрирующего и пропорционального звеньев, а также последовательным соединением интегрирующего и форсирующего. Примеры: гидравлический амортизатор (демпфер), изодромный привод.
Транспортное
Транспортное – возникает из-за затрат времени на прохождение сигнала через звено Распределенное – возникает из-за медленного нарастания сигнала на выходе звена, при этом в течении некоторого времени выходной сигнал так мал, что не может быть обработан след. звеньями.
Пример распределенного: звенья 2-го и более высокого порядка, получение передаточных функций и характеристик двигателем постоянного тока с некоторой задержкой во времени. Наиболее распространенным в практике автоматических систем является транспортное запаздывание, обусловленное пространственным перемещением элементов, передающих информацию (например, транспортерная лента, полоса прокатываемого металла). К статическим устройствам запаздывания можно отнести различного рода линии задержки электронного или параметрического типа. В некоторых случаях звено запаздывания вводится при расчете системы условно. Для ряда объектов уравнение динамики неизвестно, поэтому кривую переходного процесса реального объекта при единичном входном воздействии аппроксимируют экспонентой и эквивалентным запаздыванием. Уравнение звена запаздывания
Подстановкой в уравнение звена значения входной величины
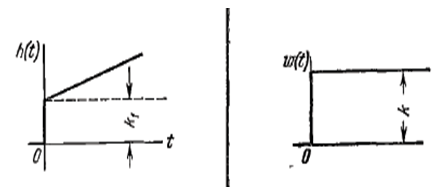
а подстановкой Временные характеристики звена запаздывания показаны на рис, а, б. На основании теоремы запаздывания запишем уравнение (3.64) в изображениях по Лапласу:
А.ф.х. звена Амплитудная частотная и фазовая частотная характеристики определяются выражениями:
Звенья запаздывания ухудшают устойчивость систем и делают их трудно управляемыми. Звено запаздывания определяет трансцендентный характер характеристического уравнения системы. Для приведения характеристического уравнения к алгебраической форме трансцендентную передаточную функцию звена раскладывают в ряд Пада и приближенно заменяют ее двумя или тремя членами ряда:
21. Структурные схемы САР и их преобразование. Структурная схема явл. графическим представлением матем-ой модели, которая иллюстрирует взаимодействия динамических звеньев в процессе работы системы. Основные элементы структурных схем:
Сумматор Имея структурную схему можно получить общую передаточную функцию всей системы. Для этого нужно учитывать вид соединения динамических звеньев. 1) последовательное соединение:
2) параллельное соединение:
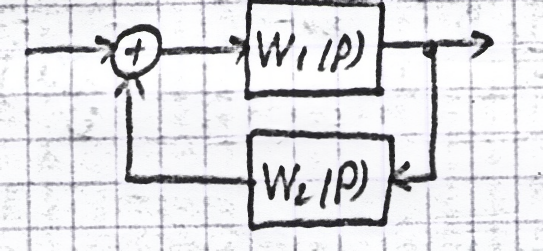
3) встречнопараллельное соединение: Представляет собой положительную или отрицательную обратную связь
W(p)=W1(p)/(1+W1(p)·W2(p)) W(p)=W1(p)/(1–W1(p)·W2(p)) В сложных схемах для получения типовых видов соединений, схему преобразуют с помощью правил преобразования: 1) однотипные элементы можно менять местами, если они расположены последовательно(узлы, сумматоры, сравнивающие устр-ва):
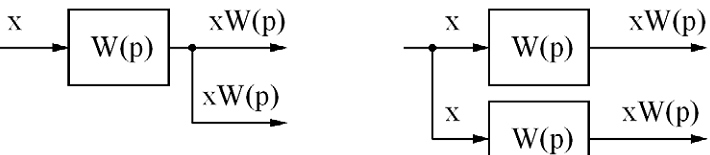
2)перенос узла с входа на выход динамического звена:
3) перенос узла с выхода на вход динамического узла:
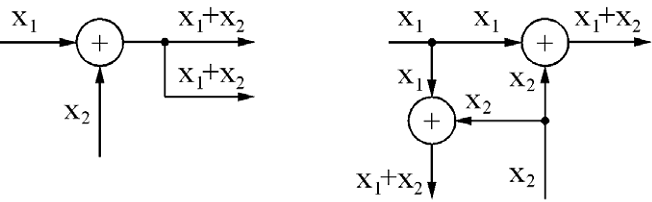
4) перенос узла со выхода на вход сумматора:
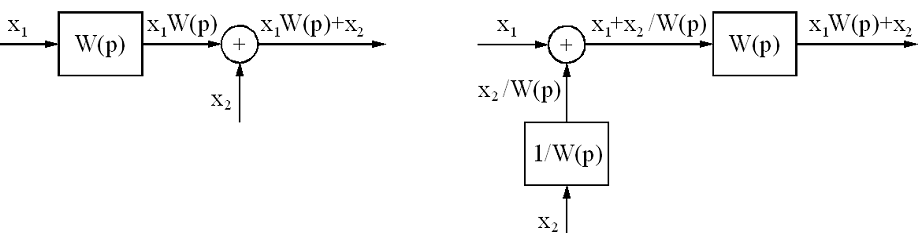
5) перенос сумматора с выхода на вход динамического звена:
6) перенос сумматора со входа на выход:
7) переход к виду системы с единичной обратной связью:
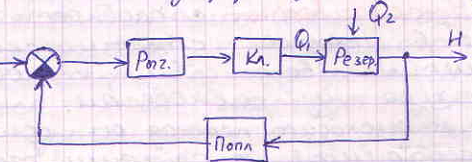
Пример составления структурной схемы: 1) стабилизирующая САР уровня жидкости:
Wз(p)=[k3/(Т3р+1)]\[1+(k1*k2*k3\(Т3р+1))]=k3\T3p+1+K K=k1k2k3 Wз(p)=[k3\1+K]\[(T3\1+K)p+1]=K\Tp+1; K=k3\(1+k); T=T3\(1+K)
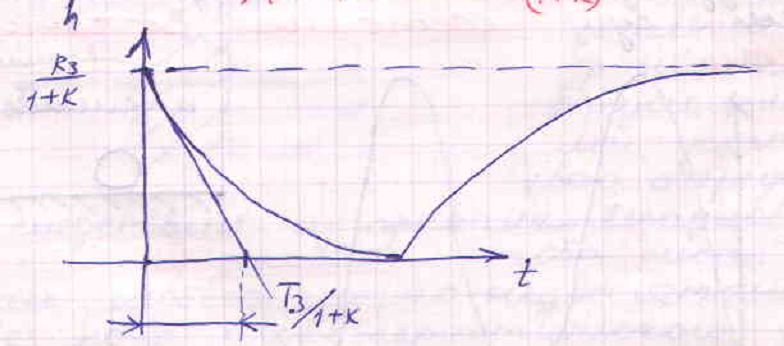
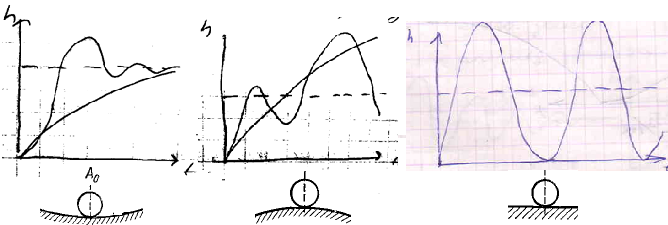
Основные понятия об устойчивости САР. Устойчивость – это способность системы возвращаться в исходное статическое состояние при снятии воздействия, кот. послужило причиной выхода из равновесия. Если происходит переход из одного статического состояния к другому, то в устойчивой системе переход будет затухающим(сходящимся), а в неустойчивой-расходящимся. Наиболее наглядно устойчивость можно оценить по переходному процессу.
Несмотря на наглядность переходного процесса, он даёт мало информации об устойчивости системы, поэтому имеется ряд методов, которые позволяют оценить устойчивость системы без построения перех-го процесса. Эти методы были разработаны на основе теории устойчивости Ляпуновым. В соотв-ии с этой теорией сходимость или расходимость переходного процесса зависит от вида левой части дифф. уравнения системы(знаменателя передаточной функции). На основе левой части ур-ния составляют характеристическое ур-ние системы, приравняв собственный оператор к 0 и считая оператор р переменным.
Характеристическое ур-ние часто называют порядком системы. Корни этого уравнения в общем случае являются комплексными числами: р=α +jβ Система будет устойчивой, если все корни имеют отрицательные вещественные части. комплексная область устойчивости-------------------->
На практике вместо решения характер-ого уравнения пользуются специальными критериями устойчивости, которые в свою очередь используют следствия из правила Ляпунова: 1)основное-чтобы сист. была устойчивой, недостаточно, чтобы все коэф хар-го уравнения были положительными(или отриц-ми). например: 1) W(p)=K\(Tp+1); 2 коэф: T и 1(2 положит-е)=> устойчивая. 2) W(p)=K\р(Tp+1)= K\Tp2+р); 3 коэф: T, 1 и 0 => неустойчивая 2)Если соблюдается 1 следствие из правил Ляпунова явл. необходимым условием при использовании критериев устойчивости. Показатели быстродействия А) время переходного процесса (время регулирования). Это время от подачи на вход ступенчатого сигнала до момента затухания переходного процесса. Б) время разгона . Время от момента подачи на вход ступенчатого сигнала до первого момента установившегося значения tp. Для монотонности переходного процесса вместо времени разгона определяют время нарастания (время до достижения половины установленного значения). Время разгона задают в виде 2-х значений: max-ограничивается допустимым быстродействием; min-ограничивается допустимыми перегрузками.
Повышение точности САР Используют следующие способы повышения точности системы: 1) повышение коэффициента передачи системы. Такой способ позволит уменьшить все коэффициенты ошибки, однако приводит к уменьшению запасов устойчивости. Поэтому такой способ применяют одновременно с мерами по повышению устойчивости. 2) повышение порядка астатизма. Это позволяет свести к нулю коэффициенты ошибки с0 при увеличении порядка с нулевого до 1-го, с1 при увеличении порядка с 1-го до 2-го и т.д. При переходе от 1-го порядка астатизма ко 2-му система приобретает структурную неустойчивость, то есть будет неустойчивой при любых значениях параметров: W(p)=k/(p(Tp+1)) W′ (p)=(k/(p(Tp+1)))·kи/p=k1/(p2(Tp+1)) Характеристическое уравнение замкнутой системы: p2(Tp+1)+k1=0; Tp2+p2+k1=0; а0=Т; а1=1; а2=0; а3=k1 Чтобы избежать такого явления, для повышения порядка астатизма вместо интегрирующих звеньев используют изодромные. Подавление средних частот. Способ заключается в снижении усиления в полосе частот от ω а до ω в с помощью полосового фильтра с частотной характеристикой. В систему вводят полосовой фильтр, ЛАЧХ которого имеет вид:
Wk(p)=((T1p+1)(T2p+1))/((Tap+1)(Tbp+1)) Недостаток: сложность реализации.
Законы регулирования. Основным элементом системы регулирования является регулятор или формирователь закона регулирования, который конструктивно представляет собой цифровой блок, имеющий набор стандартных входов и выходов. Также он выполняет ф-ии задающего и сравнивающего устройства, программного устройства. В зависимости от вида управляющего воздействия в установившемся режиме можно рассмотреть следующие виды регулирования: 1) пропорциональный (статический): U(t)=kx(t); Wрег(Р)=k Регулятор имеет низкую точность, так как относится к статическому типу и имеет установившуюся ошибку: xуст=g0/(1+k1kоб)=g0/(1+k) Достоинства: простота конструкции и обслуживания. Недостаток: низкая точность. 2) интегральный: U(t)=(kи/pr)·x(t); Wрег(0)=k/pr; r – порядок астатизма или количество интегрирующих звеньев. Достоинства: высокая точность, отсутствие статической ошибки. Недостаток: быстродействие намного ниже, чем у П регулятора. 3) Пропорционально-интегральный (изодромный): U(t)=x(t)(k+ки/p); Wрег(р)=k(1+1/Ти) Регулятор является астатическим. Быстродействие выше, чем у И регулятора, однако меньше, чем у П регулятора. Достоинства: регулятор имеет высокое быстродействие, благодаря пропорциональной части и высокую точность благодаря интегральной части Недостатки: 2 настроечных параметра (К и Ти) 4) комбинированные законы на основе дифференциального регулирования: Дифференциальное регулирование в чистом виде не применяется, так как такая система не будет работать в статическом режиме. Поэтому дифференциальную составляющую используют для получения комбинированных законов. ПД: U(t)=х(t)(k+kgp); Wрег(p)=k(1+Tgp). Регулятор является статическим, а дифференциальная составляющая повышает его быстродействие. ПИД: U(t)=x(t)(k+kи/p+kgp); Wрег(p)=k(1+1/Tup+Tgp)
НАСТРОЙКА РЕГУЛЯТОРОВ. Настроечные параметры регуляторов можно задать 2-мя способами: 1)расчетным(рассчитывают по формулам, таблицам) Экспериментальным Расчетный способ Для расчета настроечных параметров модель ОР вместе с регулирующим органом приводят к одному из 2-х вариантов:
Реальная передаточная функция:
Для типовых регуляторов используют 3 критерия качества:
1) Ϭ =20%( перерегулирование) 2) Ϭ =0 (без перерегулирования) 3) Imin (min значение интегральной оценки качества) Далее в зависимости от параметров объекта и выбранного критерия качества рассчитывают настроечные параметры регулятора. Пример: ПИД, Ϭ =20%, объект с самовыравниванием
Построение желаемой лачх. Характеристика условно разбивается на 3 участка, которые строятся по отдельности, а затем соединяются. Первый участок называется низкочастотным. 1)Низкочастотная часть графика связана с параметрами точности. Для ее построения задается допустимая погрешность δ и параметры изменения входной величины, то есть ω max и ε max (скорость и ускорение) и рассчитывают координаты контрольной точки. 1) низкочастотная часть 2)Среднечастотная часть
Если проектируется статическая система (обычно это система стабилизации) низкочастотная часть графика параллельна оси частот и расположена на уровне 20lgk, где k определяется из формулы: δ =q0/(1+k). Следящая система обычно проектируется с астатизмом 1-го порядка. Для построения НЧ участка находят координаты контрольной точки: Аk (ω k; Lk) ω k=ε max/ω max – контрольная частота. Lk=20lg(q0/δ ) Если номинальное воздействие не задано, то его лучше принять таким: q0=ω max/ω k Низкочастотный участок проходит на 3 дБ выше контрольной точки.
2)Среднечастотная часть строится по показателям быстродействия и запаса устойчивости: время переходного процесса tПП, Δ L, Δ φ, σ. Для того, чтобы система была устойчивой, среднечастотная область должна проходить через частоту среза с наклоном –20дБ/дек. Частота среза определяется по формуле: ω ср=bπ /tПП, где b – коэффициент, который зависит от величины перерегулирования. Определяется по специальной номограмме Солодовникова: Границы среднечастотного участка определяются запасами устойчивости системы: ω 2=(0, 5π –Δ φ )ω ср/2; ω 3=(8…10)ω 2=(М+1)ω ср/М.
3) Высокочастотная часть характеризует усиление высокочастотных составляющих сигнала. При построении желаемой ЛАЧХ высокочастотную часть изображают с наклоном, равным наклону высокочастотной части исходной ЛАЧХ (–60; –80дБ/дек). Низкочастотная и среднечастотная части соединяются участком с наклоном –40 или более дБ/дек.
Желаемая ЛАЧХ:
Чтобы изменить характеристику исходной системы до желаемого вида коррекцию выполняют в следующем порядке: 1) изменяют коэффициент передачи исходной системы до желаемой величины, то есть до совпадения низкочастотных участков ЛАЧХ; 2) с помощью местных обратных связей изменяют частоты излома исходной ЛАЧХ до получения следующих вариантов положения графиков:
3) различия между графиками устраняют с помощью последовательной коррекции. Характеристика корректирующего устройства графически определяются вычитанием исходной ЛАЧХ из желаемой. Жесткими; 2) гибкими. Жесткие действуют как в статическом, так и в динамическом режиме, гибкие только в динамическом.
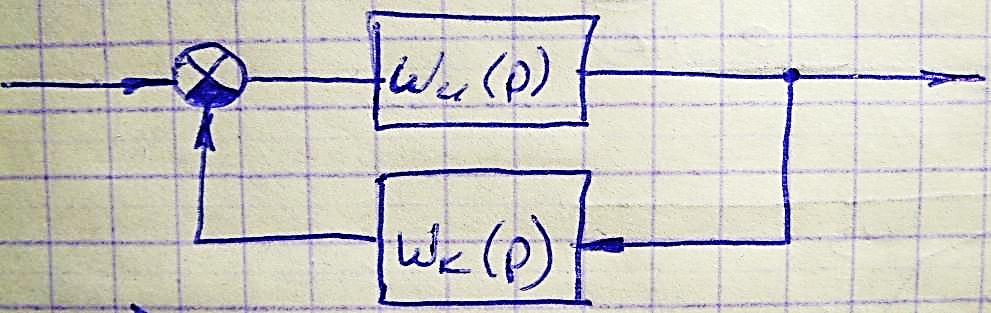
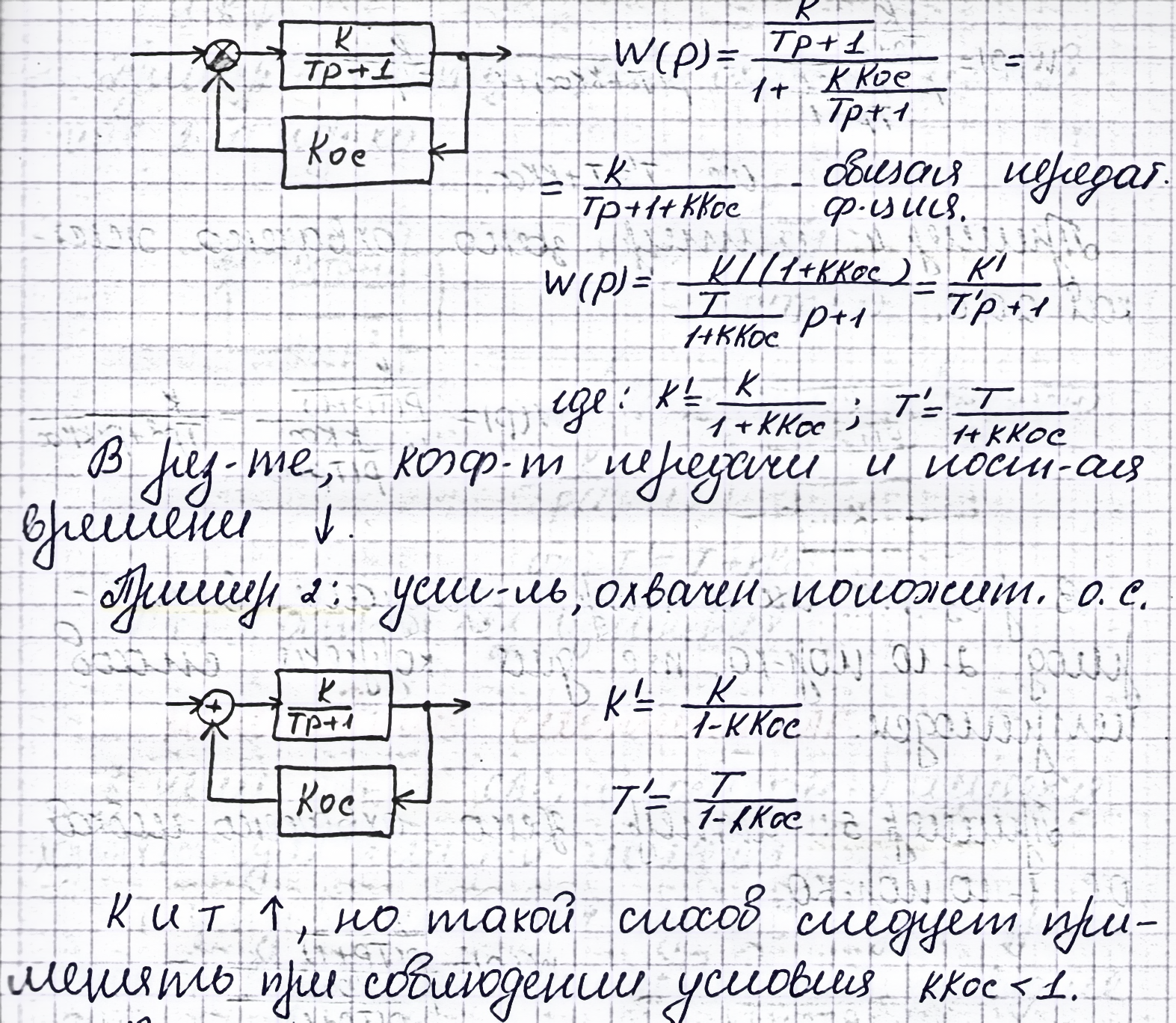
W(p)=Wи(p)/(1+Wи(p)·Wк(p) Для гибкой обратной связи в статическом режиме W(0)=Wи(0), то есть Wк(0)=0. то есть гибкие обратные связи образуются с помощью дифференцирующих звеньев. ПРИМЕРЫ! Пример № 1 – усилитель опереод звено1-го порядка охвачено жесткой оси.
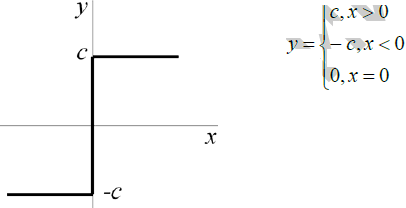
Релейные характеристики. Их особенность – это скачкообразное изменение выходной величины при плавном изменении входной. А) идеальное позиционное реле:
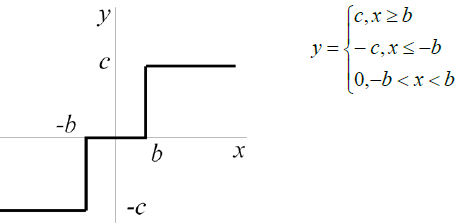
Б) трехпозиционная характеристика с мертвой зоной:
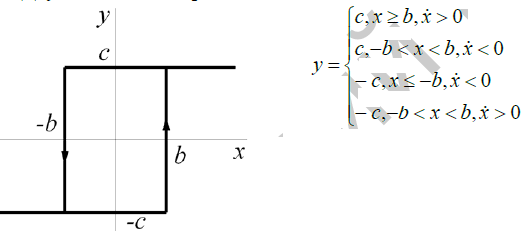
В) трехпозиционная характеристика с мертвой зоной и гистерезисом:
Пример: поляризованное реле. Г) двухпозиционное реле:
Цифровые САР.
В отличие от импульсной системы, цифровая система имеет более сложную структуру и сигнал в некоторых участках схемы представлен в виде кода:
ЦВУ (цифровое вычислительное устройство) выполняет функции сравнивающего устройства, а также некоторые функции по преобразованию сигнала. Кроме того, в составе системы имеется преобразователь непрерывного сигнала в код (Н–К, АЦП) и преобразователь кодового сигнала в непрерывный (экстраполятор, К–Н, ЦАП). В некоторых случаях ЦВУ может также выполнять роль задающего устройства, то есть задающее воздействие формируется программой. Модели элементов цифровой САР:
Как правило, используются коды с достаточно большим числом разрядов. Поэтому нелинейностью, возникающей при квантовании сигналов, можно пренебречь и рассматривать цифровой фильтр с преобразователями непрерывного сигнала в код, как импульсный. При обработке информации в ЦВУ на выполнение программы затрачивается некоторое время, поэтому ЦВУ можно представить как комбинацию импульсного фильтра и звена чистого запаздывания с передаточной функцией вида e–pτ . τ – время выполнения программы. Передаточная функция экстраполятора определяется следующим образом: WЭ(p)=(1–e–pτ )/p.
Адаптивные САУ. Примеры построения поисковых САУ Адаптивными называются системы, которые в процессе эксплуатации при изменении параметров объектов или внешних условий самостоятельно изменяют параметры, регулирующие ее структуру или настройку для поддержания оптимального режима работы. Характеризуются наличием в составе контура самонастройки, назначение которого состоит в логической переработке информации об изменяющихся условиях работы и последующем воздействии на основной контур управления. В зависимости от способа определения экстремума целевой функции различают: 1)Беспоисковые системы (адаптация осуществляется на основе информации об объекте или внешних условиях) 2)Поисковые системы (для выделения экстремума некоторой целевой функции φ используется различные виды поиска). В системе выделяют объект оптимизации (регулятор или его часть) и выбирают целевую функцию - легко контролируемый параметр, характеризующий качество работы системы. В состав объекта оптимизации вводят датчик целевой функции. Также назначают параметр настройки, от которого зависит целевая функция, т. е φ =f(μ ). Если параметр один, то система- одномерная, если несколько- многомерная. 2)Поисковые системы делятся на : Система случайного поиска
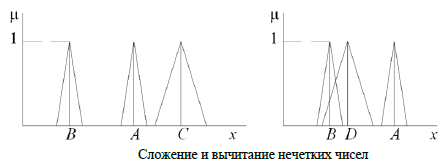
Системы случайного поиска по структуре подобны системам слепого поиска, но вместо сканирования задаются случайно выбранные значения μ. Сравнивая полученные значения целевой функции постепенно сужают разброс варьируемых параметров и приближаются к экстремуму. СИСТЕМЫ С НЕЧЕТКОЙ ЛОГИКОЙ
Системы с нечеткой логикой относятся к числу систем с искусственным интеллектом и предназначены для управления объектами, информация о которых ограничена или их свойства изменяются в широких пределах. Для таких объектов алгоритм управления практически невозможно формализовать, поэтому используют нечеткую логику, разработанную американским ученым Лютфи Заде. Она оперирует нечеткими множествами, для которых невозможно установить четкие границы. Для элементов х нечеткого множества А вводится понятие функции принадлежности К нечетким множествам относится множество значений величины x, если для нее заданы предельные отклонения ±Δ х. Диапазон [x- Δ х, x+ Δ х] называется нечетким числом. Если два нечетких числа А и В определены на совпадающих интервалах, то справедливо нечеткое равенство А≈ В Для нечетких чисел также используют понятия ограниченной суммы и ограниченной разности.
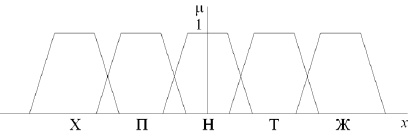
В случае применения операций с нечеткими числами для целей автоматического управления вместо численных значений величин используют лингвистические переменные. Например, в случае регулирования температуры интервал ее изменения разбивается на меньшие интервалы с определенными функциями принадлежности. Каждому интервалу лингвистическое значение: Н-нормально, П-прохладно, Х-холодно, Т-тепло, Ж-жарко.
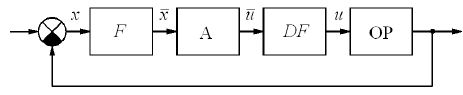
Структура системы с нечеткой логикой:
Регулирующая часть системы выполняется на основе цифровых устройств и включает 3 блока: F – фаззификатор, формирующий линвистическую переменную А – блок реализации алгоритма (инференц-блок), выполняющий операции с нечеткими числами и формирующий лингвистическую переменную DF – дефаззификатор, преобразующий лингвистическую переменную Система формирует выходную величину методом последовательных приближений к номиналу. Лингвистическая переменная
жарко сильно уменьшить ток тепло немного уменьшить ток нормально оставить …. в итогеСАР работает медленно и менее точно по сравнению с обычной сар, нопозволяет работать с объектами, динамические свойства которых плохо определены. (кондиционеры, стиралки и т д )
Фундаментальные принципы построения САУ. Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 2088; Нарушение авторского права страницы



 К – компенсатор.
К – компенсатор.







 С(р)·y=k·x, С(р) – собственный оператор звена, который представляет собой многочлен не выше второго порядка.
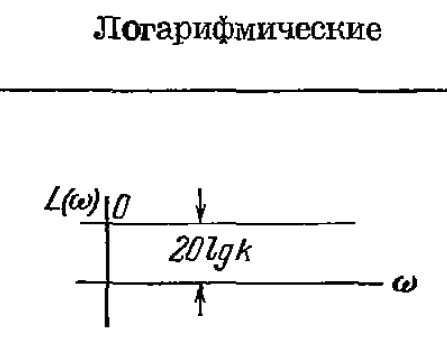
С(р)·y=k·x, С(р) – собственный оператор звена, который представляет собой многочлен не выше второго порядка.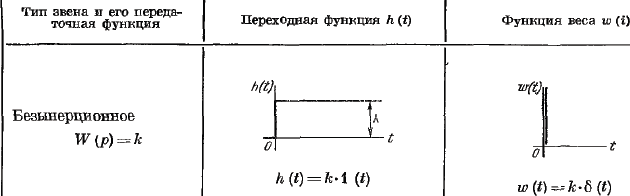 1) безынерционное звено (усилительное или идеальное).
1) безынерционное звено (усилительное или идеальное). 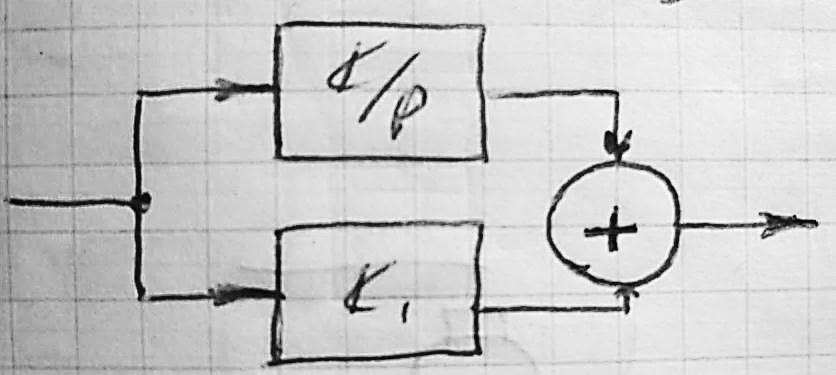


 2) Распределенное
2) Распределенное  Пример транспортного: трубопроводы, линии связи, транспортеры и тд.
Пример транспортного: трубопроводы, линии связи, транспортеры и тд. не является дифференциальным и относится к классу особых уравнений со смещенным аргументом.
не является дифференциальным и относится к классу особых уравнений со смещенным аргументом.
 получим его переходную функцию:
получим его переходную функцию: 
 – импульсную:
– импульсную: 





 или
или 









 Рассмотрим передаточную функцию по возмущающему воздействию Q2, для этого структурную схему изобразим со стороны возмущающего воздействия:
Рассмотрим передаточную функцию по возмущающему воздействию Q2, для этого структурную схему изобразим со стороны возмущающего воздействия: 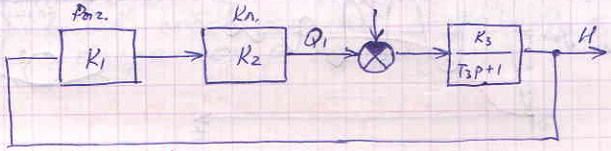
 a0pn+a1pn-1+…+ an-1pn-1+an=0
a0pn+a1pn-1+…+ an-1pn-1+an=0 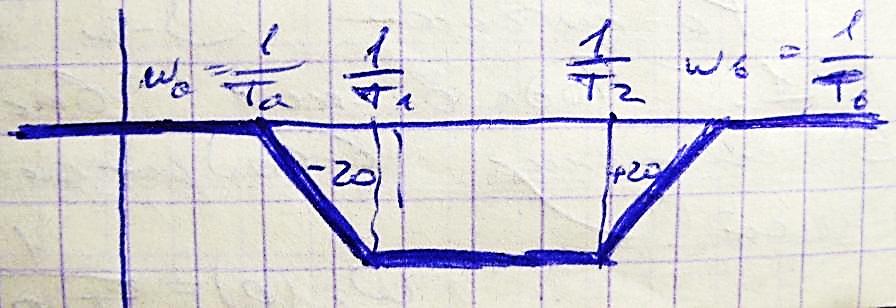
 - объект с самовыравниванием
- объект с самовыравниванием -объект без самовыравнивания, т.е. интегрирующий
-объект без самовыравнивания, т.е. интегрирующий
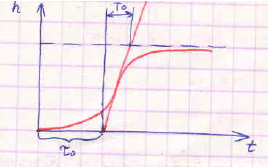
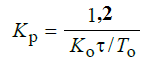 , Tu=2τ 0, Тd=0, 4τ 0
, Tu=2τ 0, Тd=0, 4τ 0 








 которая по сути дела является степенью уверенности в том, что рассматриваемый элемент является членом множества.
которая по сути дела является степенью уверенности в том, что рассматриваемый элемент является членом множества.
 , что соответствует ошибке рассогласования Х.
, что соответствует ошибке рассогласования Х. , что соответствует управляющему воздействию.
, что соответствует управляющему воздействию.