
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Апериодическое звено 2-го порядка.
(Т1р+1)·(Т2р+1)y=k·x; (Т1Т2р2+(Т1+Т2)р+1)y=kx; W(p)=k/((Т1р+1)·(Т2р+1)) Примеры: 2 последовательно соединенных звена 1-го порядка, электромагнитный усилитель, двигатель постоянного тока (входная величина – напряжение, выходная – скорость вращения).
4) колебательное звено. (Т2р2+2ξ Тр+1)y=kx; 0< ξ < 1. ξ – параметр затухания. Переходный процесс имеет колебательный характер и параметр ξ характеризует скорость затухания колебаний. W(p)=k/(Т2р2+2ξ Тр+1)
1/T – собственная частота колебаний. На собственной частоте наблюдается явление резонанса. Чем меньше ξ, тем выше усиление на резонансной частоте. Примеры: колебательный контур, упругая система с подвижной массой. 5)Консервативное звено (частный случай колебательного звена, в котором ξ =0 ) (Т2р2+1)y=kx; W(p)=k/(Т2р2+1) Пример: генератор.
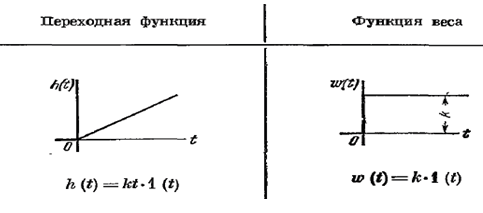
Типовые динамические звенья. Интегрирующие звенья и их характеристики. Для анализа систему разбивают на типовые динамические звенья, то есть на устройства, которые описываются дифференциальными уравнениями определенного вида (не выше 2-го порядка). По виду уравнения все типовые звенья делят на несколько групп: II) интегрирующие звенья. С(р)y=k/p·x Идеальное интегрирующее звено. y=k/p·x; W(p)=k/p. Пример: конденсатор, через который течет ток, интегрирующий усилитель, наполняющаяся ванная.
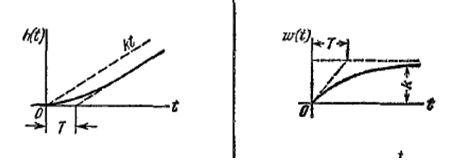
Интегрирующее звено с замедлением. (Тр+1)·y=k/p·x; W(p)=k/(p(Tp+1)) (Т1р+1)·(Т2р+1)y=k/p·x Пример: двигатель постоянного тока, если выходной величиной считать угол поворота.
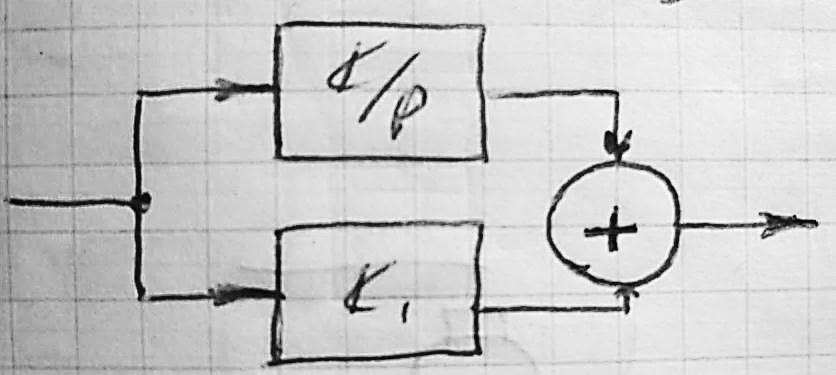
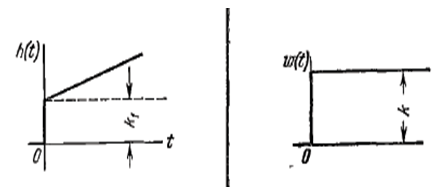
Изодромные звенья. y=(k/p+k1)x=k/p·x+k1x; W(p)=k/p+k1=k/p·(Тр+1) Изодромное звено можно получить параллельным соединением интегрирующего и пропорционального звеньев, а также последовательным соединением интегрирующего и форсирующего. Примеры: гидравлический амортизатор (демпфер), изодромный привод.
Типовые динамические звенья. дифференцирующие звенья и их характеристики. Для анализа систему разбивают на типовые динамические звенья, то есть на устройства, которые описываются дифференциальными уравнениями определенного вида (не выше 2-го порядка). По виду уравнения все типовые звенья делят на несколько групп: III) дифференцирующие звенья. С(р)y=kxp Идеальное дифференцирующее звено. y=kxp; W(p)=kp. h(t)=δ (t)=1'(t) Примеры: дифференциальный усилитель, тахогенератор.
Дифференцирующее звено с замедлением (реальное дифференцирующее звено). (Тр+1)·y=kpx; W(p)=kp/(Тр+1). Примеры: дифференцирующая RC-цепь, тахогенератор, если требуется считывать его постоянные времени.
3) форсирующие звенья. Представляют собой комбинации дифференцирующих и позиционных звеньев y=kС(р)
Звенья с запаздыванием и их характеристики. Звенья с запаздыванием представляют собой комбинацию любого из рассмотренных звеньев и звена чистого запаздывания, которое описывается уравнением: y(t)=x(t–τ ), где τ – время запаздывания.
Запаздывание: Транспортное
Транспортное – возникает из-за затрат времени на прохождение сигнала через звено Распределенное – возникает из-за медленного нарастания сигнала на выходе звена, при этом в течении некоторого времени выходной сигнал так мал, что не может быть обработан след. звеньями.
Пример распределенного: звенья 2-го и более высокого порядка, получение передаточных функций и характеристик двигателем постоянного тока с некоторой задержкой во времени. Наиболее распространенным в практике автоматических систем является транспортное запаздывание, обусловленное пространственным перемещением элементов, передающих информацию (например, транспортерная лента, полоса прокатываемого металла). К статическим устройствам запаздывания можно отнести различного рода линии задержки электронного или параметрического типа. В некоторых случаях звено запаздывания вводится при расчете системы условно. Для ряда объектов уравнение динамики неизвестно, поэтому кривую переходного процесса реального объекта при единичном входном воздействии аппроксимируют экспонентой и эквивалентным запаздыванием. Уравнение звена запаздывания
Подстановкой в уравнение звена значения входной величины
а подстановкой Временные характеристики звена запаздывания показаны на рис, а, б. На основании теоремы запаздывания запишем уравнение (3.64) в изображениях по Лапласу:
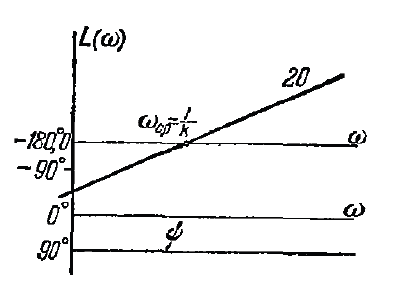
А.ф.х. звена Амплитудная частотная и фазовая частотная характеристики определяются выражениями:
Звенья запаздывания ухудшают устойчивость систем и делают их трудно управляемыми. Звено запаздывания определяет трансцендентный характер характеристического уравнения системы. Для приведения характеристического уравнения к алгебраической форме трансцендентную передаточную функцию звена раскладывают в ряд Пада и приближенно заменяют ее двумя или тремя членами ряда:
21. Структурные схемы САР и их преобразование. Структурная схема явл. графическим представлением матем-ой модели, которая иллюстрирует взаимодействия динамических звеньев в процессе работы системы. Основные элементы структурных схем:
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1812; Нарушение авторского права страницы
 В маломощных двигателях с небольшой индуктивностью якоря электрической постоянной времени можно пренебречь и рассматривать двигатель как апериодическое звено 1-го порядка.
В маломощных двигателях с небольшой индуктивностью якоря электрической постоянной времени можно пренебречь и рассматривать двигатель как апериодическое звено 1-го порядка.













 2) Распределенное
2) Распределенное  Пример транспортного: трубопроводы, линии связи, транспортеры и тд.
Пример транспортного: трубопроводы, линии связи, транспортеры и тд. не является дифференциальным и относится к классу особых уравнений со смещенным аргументом.
не является дифференциальным и относится к классу особых уравнений со смещенным аргументом.
 получим его переходную функцию:
получим его переходную функцию: 
 – импульсную:
– импульсную: 





 или
или 


