
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Прямоугольная система координат на плоскости.Стр 1 из 18Следующая ⇒
Лекция 1. Введение: цели и содержание курса, литература. Декартова прямоугольная системы координат на плоскости. Простейшие задачи аналитической геометрии: расстояние между двумя точками, деление отрезка в данном отношении, площадь треугольника.
1.1. Математика ─ одна из самых древних наук. Основные особенности математики ─ абстрактность, логическая строгость, исключительная широта её приложений. Абстракция свойственна не только математике. Но если в других науках для доказательства утверждений исследователи постоянно обращаются к опыту, то в математике справедливость утверждения доказывается не проверкой его на примерах, а чисто логическим путём: теоремы доказываются только путём рассуждений и строгих математических выкладок. Без применения математических методов была бы невозможна современная техника. Точные науки (астрономия, механика, физика, химия) развивают свои теории, используя математический аппарат, их прогресс был бы немыслим без математики. Наиболее значительным научным достижением было внедрение математических методов в экономическую науку и в управление экономическими процессами может быть осуществлено только на основе применения точных математических методов во всех сферах народного хозяйства ─ от прогнозирования размещения полезных ископаемых до изучения спроса на товары широкого потребления и бытовые услуги, от изучения потребности в рабочей силе до планирования транспортных артерий, пассажирских перевозок и т.д. Этим определяется место математики в системе высшего образования. Современный экономист, финансист, бухгалтер должен не только знать основы математики, но и хорошо владеть новейшими математическими методами исследования, которые могут применятся в области его деятельности. 1.2. Цель нашего курса ─ овладение основами высшей математики. Мы познакомимся с основными понятиями, фактами и методами таких её разделов как аналитическая геометрия, высшая алгебра, векторная и линейная алгебра, математический анализ и дифференциальные уравнения. Небольшое число часов, отводимое читаемому курсу, не позволит нам подробно и полно осветить материал этих разделов, но основные понятия, методы и приложения их в лекциях отражены по возможности. Для более глубокого овладения курсов «Высшая математика» советуем обратиться к соответствующей литературе. 1.3. Аналитическая геометрия отличается от элементарной геометрии главным образом своим методом. Элементарная геометрия доказывает свои теоремы с помощью чертежа, т.е. с помощью построения. Поэтому говорят, что элементарная геометрия есть геометрия построения. В аналитической геометрии при выводе её основных правил и формул первоначально также прибегают к построению ─ чертежу, но затем, опираясь на полученные правила и формулы, все геометрические задачи решаются с помощью вычислений. Поэтому говорят, что аналитическая геометрия есть геометрия вычисления. Элементарная геометрия не имеет общего доказательства теорем, т.к. те построения, которые применяются для доказательства одной теоремы неприменимы для доказательства другой и поэтому для каждой новой теоремы приходится отыскивать и новое построение при её доказательстве. Аналитическая же геометрия обладает общим методом решения геометрических задач, т.к. правила и формулы, с помощь, которых решается данная, отдельно взятая задача, применимы и для решения целого ряда других весьма разнообразных геометрических задач. Этот метод, называемый методом координат, был введён в науку в ХVII в. известным французским математиком и философом Рене Декартом. В основе метода координат лежит понятие системы координат.
Площадь треугольника.
Теорема 1.3. Для любых точек А(х1; у1), В(х2; у2) и С(х3; у3), не лежащих на одной прямой, площадь S треугольника АВС выражается формулой S =
Доказательство. Площадь ∆ АВС, изображённого на рис. 1.7, вычисляем следующим образом:
Вычисляем площади трапеций: SADEC = SBCEF = SABFD = Теперь имеем SABC = - х1у3) = - (х3 – х1)(у2 – у1)). Для другого расположения ∆ АВС формула (6) доказывается аналогично, но может получиться со знаком «-». Поэтому в формуле (6) ставят знак модуля.
Лекция 2.
Уравнение прямой линии на плоскости: уравнение прямой с главным коэффициентом, общее уравнение прямой, уравнение прямой в отрезках, уравнение прямой, проходящей через две точки. Угол между прямыми, условия параллельности и перпендикулярности прямых на плоскости.
2.1. Пусть на плоскости задана прямоугольная система координат и некоторая линия L.
Определение 2.1. Уравнение вида F(x; y) = 0, связывающее переменные величины x и y, называется уравнение линии L (в заданной системе координат), если этому уравнению удовлетворяют координаты любой точки, лежащей на линии L, и не удовлетворяют координаты никакой точки, не лежащей на этой прямой.
Примеры уравнений линий на плоскости.
1) Рассмотрим прямую, параллельную оси Oy прямоугольной системы координат (рис. 2.1). Обозначим буквой A точку пересечения этой прямой с осью Ox, (a; o) ─ её ор-
2) Уравнение x - y = 0 определяет множество точек плоскости, составляющих биссектрисы I и III координатных углов.
3) Уравнение x2 - y2 = 0 ─ это уравнение двух биссектрис координатных углов.
4) Уравнение x2 + y2 = 0 определяет на плоскости единственную точку O(0; 0).
5) Уравнение x2 + y2 = 25 ─ уравнение окружности радиуса 5 с центром в начале координат.
Общее уравнение прямой.
Теорема 2.1. Каждая прямая на плоскости с прямоугольной системой координат определяется уравнением первой степени
Ax + By + C = 0, где A и B одновр. ¹ 0, (5) и, обратно, уравнение (5) при произвольных коэффициентах A, B и C (A и B одновременно не равны нулю) определяет некоторую прямую на плоскости.
Доказательство. Сначала докажем первое утверждение. Если прямая не перпендикулярна оси Ox, то она определяется уравнением первой степени y = kx + b или kx – y + b = 0, т.е. уравнением вида (5), где A = k, B = -1, C = b. Если прямая перпендикулярна оси Ox, то согласно примера 1) из п. 2.2 её уравнение имеет вид x = a или x – a = 0, т.е. является уравнением вида (5) при A = 1, B = 0 и C = -a. Тем самым первое утверждение доказано. Докажем обратное утверждение. Пусть дано уравнение (5), причём хотя бы один из коэффициентов A или B отличен от нуля. Если, например, B ¹ 0, то уравнение (5) можно записать в виде
y = -
т.е. в виде уравнения с угловым коэффициентом. По п. 2.3 это уравнение определяет на плоскости прямую. Если же B = 0, то A ¹ 0 и уравнение (5) имеет вид x = -
Уравнение первой степени (5) называется общим уравнением прямой на плоскости. Лекция 3. Расстояние от точки до прямой. Взаимное расположение двух прямых на плоскости.
Лекция 4.
Эллипс. Окружность.
Определение 4.1. Эллипсом называется множество всех точек плоскости, для каждой из которых сумма расстояний до двух данных точек, называемых фокусами, есть величина постоянная, большая чем расстояние между фокусами. Пусть F1(-c; 0) и F2(c; 0) ─ фокусы. Тогда F1F2 = 2c ─ фокусное расстояние
Пусть M(x; y) ─ произвольная точка эллипса. Тогда по определению F1M + F2M = 2a > 2c, откуда a > c. Так как F1M = Преобразуем это уравнение: ( (x2 + 2cx + c2) + y2 = 4a2 – 4a a Возводя в квадрат последнее уравнение, имеем
a2(x2 – 2cx + c2 + y2) = a4 – 2cxa2 + c2x2, (a2 – c2)x2 + a2y2 = a2(a2 – c2).
Так как a > c, то a2 – c2 > 0 и можем обозначить b2 = a2 – c2. Тогда
b2x2 + a2y2 = a2b2,
Таким образом, координаты любой точки эллипса удовлетворяют уравнению (1).
Покажем обратное: если координаты точки M(x; y) удовлетворяют уравнению (1), то точка M лежит на эллипсе.
Из (1) найдём y2: y2 = b2(1 - Тогда F1M = Т.к. c < a и из (1) │ Аналогично можно вычислить F2M = Теперь F1M + F2M = Из уравнения (1): b2 > 0 Þ a2 – c2 > 0, т.е. a > c, откуда 2a > 2c. Значит, точка M лежит на эллипсе.
Уравнение (1) называется каноническим уравнением эллипса. Изображён эллипс с уравнением (1) на рис 4.2.
ε = Так как 0 < c < a, то 0 < ε < 1. Фокальными радиусами точки M называют отрезки F1M и F2M. Их длины r1 и r2 вычисляют по формулам r1 = a + ε x r2 = a – ε x Уравнение (1) можно рассматривать и в случае, когда b > a, оно определяет эллипс с большой полуосью OB = b, фокусы такого эллипса лежат на оси Oy, причём a2 = b2 – c2. В случае, когда a = b, уравнение (1) принимает вид
и определяет окружность радиуса а с центром в начале координат (рис. 4.3). В этом случае c = 0, поэтому ε = 0.
(x – x0)2 + (y – y0)2 = R2 Такое уравнение называют каноническим уравнением окружности.
Гипербола.
Определение 4.2. Гиперболой называется множество всех точек плоскости, для каждой из которых модуль разности расстояний до двух данных точек, называемых фокусами, есть величина постоянная, меньшая, чем расстояние между фокусами.
Пусть F1(-c; 0) и F2(c; 0) ─ фокусы. Тогда F1F2 = 2c ─ фокусное расстояние (рис.4.4). Постоянную величину, о которой идёт речь в определении, обозначим 2a. Тогда по определению 2a < 2c, т.е. a < c. Пусть M(x; y) ─ произвольная точка гиперболы. Рассуждая по аналогии с п. 4.1, можем получить уравнение
где b2 = c2 – a2.
Прямоугольник MNKL, стороны которого MN = LK = 2a, ML = NK = 2b, называется основным прямоугольником, где центр совпадает с началом координат. Прямые MK и NL называют асимптотами гиперболы, их уравнения: y = x2 – y2 = a2. Уравнение - определяет гиперболу с действительной осью Oy (рис. 4.6).
Гиперболы, определяемые уравнениями (1) и (2) в одной и той же системе координат, называются сопряжёнными. Эксцентриситет гиперболы ─ это отношение фокусного расстояния к расстоянию между вершинами гиперболы (т.е. точками пересечения гиперболы с осями). Для уравнения (1) ε = Так как c > a, то ε > 1. Фокусные радиусы точки M гиперболы ─ это отрезки F1M и F2M. Их длины r1 и r2 для правой ветви r1 = ε x + a, r2 = ε x – a, для левой ветви r1 = -ε x − a, r2 = - ε x + a.
Парабола.
Возьмём в прямоугольной системе координат точку F( MK = MF. Тогда
Возводим уравнение а квадрат и приводим подобные члены:
y2 = 2px (4)
Уравнение (4) называется каноническим уравнением параболы. Вершину p называют параметром параболы. Парабола с уравнением (4) изображена на рис. 4.8.
Если парабола имеет уравнение y2 = - 2px, то её график расположен слева от оси Oy (рис. 4.9). Уравнения x2 = -2pyи x2 = -2py, p > 0 определяют параболы, изображённые на рис. 4.10 и 4.11, соответственно.
Лекция 5 Понятие о матрице.
Таблица чисел аik вида
состоящая из m строк и n столбцов называется матрицей размерности m × n. Числа аik называются её элементами. Если m ¹ n, то матрица называется прямоугольной. Если же m = n, то матрица называется квадратной. В частности, если m = 1, n > 1, то матрица (а11 а12 … а1n) называется матрицей-строкой. Если же m > 1, n = 1, то матрица называется матрицей-столбцом. Число строк в квадратной матрице называют порядком такой матрицы. Например, матрица Матрицы будем обозначать большими латинскими буквами. Две матрицы A и B называются равными (А = В), если они одинакового размера и их соответствующие элементы равны. Так, если А =
Умножение матрицы на число. Определение. Произведением матрицы А на число α называется матрица α А, элементы которой равны произведению числа α на соответствующие элементы матрицы А. Пример. 2А – 3В, если А =
2А – 3В = 2
Умножение матриц. Определение. Произведением матрицы А размерности m × n и матрицы В размерности n × k, элементы которой сij вычисляются как сумма произведений соответствующих элементов аil I – й строки матрицы А и элементов blj j – го столбца матрицы В, т.е. cij = ai1b1j + ai2b2j + … + ainbnj, I = 1, 2, …, m; j = 1, 2, …, k.
Примеры: 1)
2)
3)
Определение. Квадратная матрица порядка n вида называется единичной матрицей и обозначается En.
Свойства умножения матриц 1) Умножение матриц некоммутативно, т.е. AB ¹ BA. 2) Умножение матриц ассоциативно, т.е. A(BC) = (AB)C, если такие произведения существуют. 3) Если A ─ матрица размерности m× n, B ─ матрица размерности n× k, то A× En=A, En× B=B.
Транспонирование матрицы. Определение. Если в матрице А = Аt = Свойства транспонирования матриц. 1) (At)t = A; 2) (A + B)t = At + Bt; 3) (AB)t = BtAt.
Пример. Найти 2At + (AB)t, если А = 2Аt + (AB)t = 2 +
5.6. Элементарные преобразования строк матрицы. Определение. Элементарными преобразованиями строк матрицы называют следующие преобразования: 1) умножение строки матрицы на ненулевое действительное число; 2) прибавление к одной строке матрицы другой её строки, умноженной на произвольное действительное число.
Лемма 5.1. С помощью элементарных преобразований строк матрицы можно поменять местами любые две строки матрицы. Док-во. А=
Лекция 6. Пример.
+ (-1)(-1)3+2
6.3. Определитель n-го порядка (n Î N). Определение. Определителем n-го порядка, соответствующим матрице n-го порядка А = Называется число, равное сумме произведений элементов какой-либо строки (столбца) на их алгебраические дополнения, т.е.
│ A│ = Нетрудно заметить, что при n = 2 получается формула для вычисления определителя второго порядка.
Пример. + 2× (-1)4+4
Заметим, что если в определителе все элементы какой-либо строки (столбца), кроме одного, равны нулю, то при вычислении определителя его удобно разложить по элементам этой строки (столбца).
Пример. │ Еn│ =
Свойства определителей. Определение. Матрицу вида
будем называть треугольной матрицей.
Свойство 1. Определитель треугольной матрицы равен произведению элементов главной диагонали, т.е.
Свойство 2. Определитель матрицы с нулевой строкой или нулевым столбцом равен нулю.
Свойство 3.. При транспонировании матрицы определитель не изменяется, т.е. │ А│ = │ Аt│. Свойство 4. Если матрица В получается из матрицы А умножением каждого Элемента некоторой строки на число k, то │ В│ = k│ А│
Свойство 5.
Свойство 6. Если матрица В получается из матрицы А перестановкой двух строк, то │ В│ = − │ А│.
Свойство 7. Определитель матрицы с пропорциональными строками равен нулю, в частности, нулю равен определитель матрицы с двумя одинаковыми строками.
Свойство 8. Определитель матрицы не изменяется, если к элементам одной строки прибавить элементы другой строки матрицы, умноженные на некоторое число.
Замечание. Так как по свойству 3 определитель матрицы не меняется при транспонировании, то все свойства о строках матрицы верны и для столбцов.
Свойство 9. Если А и В ─ квадратные матрицы порядка n, то │ АВ│ =│ А│ │ В│. Обратная матрица. Определение. Квадратная матрица А порядка n называется обратной, если существует матрица В такая, что АВ = ВА = Еn. В этом случае матрица В называется обратной к матрице А и обозначается А-1.
Теорема 2. Справедливы следующие утверждения: 1) если матрица А обратима, то существует точно одна ей обратная матрица; 2) обратная матрица имеет определитель, отличный от нуля; 3) если А и В ─ обратные матрицы порядка n, то матрица АВ обратима, причём (АВ)-1 = В-1 × А-1. Доказательство. 1) Пусть В и С ─ матрицы, обратные к матрице А, т.е. АВ = ВА = Еn и АС = СА = Еn. Тогда В = ВЕn = В(АС) = (ВА)С = ЕnС = С.
2) Пусть матрица А обратима. Тогда существует матрица А-1, ей обратная, причём АА-1 = Еn. По свойству 9 определителя │ АА-1│ =│ А│ │ А-1│. Тогда │ А│ │ А-1│ =│ Еn│, откуда │ А│ │ А-1│ = 1. Следовательно, │ А│ ¹ 0.
3) Действительно, (АВ)(В-1А-1) = (А(ВВ-1))А-1 = (АЕn)А-1 = АА-1 = Еn. (В-1А-1)(АВ) = (В-1(А-1А))В = (В-1Еn)В = В-1В = Еn. Следовательно, АВ ─ обратимая матрица, причём (АВ)-1 = В-1А-1.
Следующая теорема даёт критерий существования обратной матрицы и способ её вычисления. Теорема 3. Квадратная матрица А обратима тогда и только тогда, когда её определитель отличен от нуля. Если │ А│ ¹ 0, то А-1 =
Пример. Найти матрицу, обратную для матрицы А = Решение. │ А│ = Так как │ А│ ¹ 0, то существует обратная матрица А-1 = Вычисляем А11 = 3, А12 = 1, А21 = -1, А22 = 2. Тогда А-1 = Лекция 7. Системы линейных уравнений. Критерий совместности системы линейных уравнений. Метод Гаусса решения систем линейных уравнений. Правило Крамера и матричный метод решения систем линейных уравнений.
Систем линейных уравнений. Совокупность уравнений вида
называется системой m линейных уравнений с n неизвестными х1, х2, …, хn. Числа aij называются коэффициентами системы, а числа bi ─ свободными членами. Решением системы (1) называется совокупность чисел с1, с2, …, сn, при подстановке которых в систему (1) вместо х1, х2, …, хn, получаем верные числовые равенства. Решить систему ─ значит найти все её решения или доказать, что их нет. Система называется совместной, если она имеет хотя бы одно решение, и несовместной, если решений нет. Матрица, составленная из коэффициентов системы А = Называется матрицей системы (1). Если к матрице системы добавить столбец свободных членов, то получим матрицу В = которую называют расширенной матрицей системы (1). Если обозначим Х =
Теорема Кронекера-Капелли. Для того, чтобы система линейных уравнений была совместна, необходимо и достаточно, чтобы ранг матрицы системы был равен рангу расширенной матрицы.
Пример. Исследовать систему на совместность
Решение. Приведение матрицы системы и расширенной матрицы системы к ступенчатому виду будем выполнять одновременно.
Ранг матрицы системы равен 2, а ранг расширенной матрицы системы равен 3. По теореме Кронекера-Капелли система несовместна.
Примеры. 1).
2)
3)
Лекция 8. Понятие вектора.
Некоторые физические величины (например: температура, масса, объём, длина) могут быть охарактеризованы одним числом, которое выражает отношение этой величины к соответствующей единицы измерения. Такие величины называются скалярными. Другие величины (например: сила, скорость, ускорение) характеризуются не только числом, но и направлением. Эти величины называются векторными. Для описания таких величин в математике введено понятие «вектор». Определение. Любая упорядоченная пара точек А и В пространства определяет направленный отрезок, т.е. отрезок с заданными на нём направлением. Направленный отрезок называется вектором. На рисунке направление вектора обычно изображают стрелкой. Если в упорядоченной паре точка А первая, то её называют началом вектором, а точку В ─ концом вектора. Вектор обозначается
Векторы Коллинеарные векторы могут быть направлены одинаково или противоположно (рис.2). Векторы Векторы Три вектора
Проекция вектора на ось. Пусть в пространстве задана ось ℓ и некоторый вектор Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 874; Нарушение авторского права страницы
 ô (х2 – х1)(у3 – у1) – (х3 – х1)(у2 – у1)ô (6)
ô (х2 – х1)(у3 – у1) – (х3 – х1)(у2 – у1)ô (6)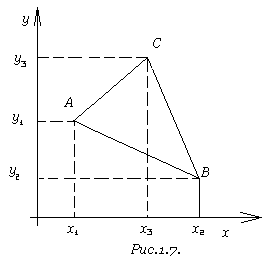 SABC = SADEC + SBCEF – SABFD.
SABC = SADEC + SBCEF – SABFD. ,
, 

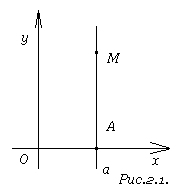 динаты. Уравнение x = a является уравнением данной прямой. Действительно, этому уравнению удовлетворяют координаты любой точки M(a; y) этой прямой и не удовлетворяют координаты ни одной точки, не лежащей на прямой. Если a = 0, то прямая совпадает с осью Oy, которая имеет уравнение x = 0.
динаты. Уравнение x = a является уравнением данной прямой. Действительно, этому уравнению удовлетворяют координаты любой точки M(a; y) этой прямой и не удовлетворяют координаты ни одной точки, не лежащей на прямой. Если a = 0, то прямая совпадает с осью Oy, которая имеет уравнение x = 0. x -
x -  ,
,  (рис. 4.1). Постоянную величину, о которой идёт речь в определении эллипса, обозначим 2a.
(рис. 4.1). Постоянную величину, о которой идёт речь в определении эллипса, обозначим 2a. , F2M =
, F2M =  , то имеем уравнение
, то имеем уравнение  +
+  = 2a
= 2a )2,
)2,  + (x2 + 2cx + c2) + y2,
+ (x2 + 2cx + c2) + y2,  = a2 – cx.
= a2 – cx. = 1 (1)
= 1 (1) ).
). =
=  =
=  =
=  = │
= │  │
│  . Следовательно,
. Следовательно,  .
. .
. .
.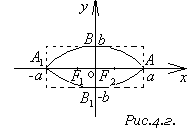 Точки пересечения эллипса с осями координат называются вершинами эллипса. Оси симметрии эллипса (оси Ox и Oy) называют осями эллипса. Точка пересечения осей ─ центр эллипса. Осями называют также отрезки A1A = 2a, B1B = 2b. Отрезки OA = a, OB = b и их длины называют полуосями. В нашем случае a > b, поэтому а называют большой полуосью, b ─ малой полуосью. Эксцентриситетом эллипса называется отношение фокусного расстояния к длине большой оси, т.е.
Точки пересечения эллипса с осями координат называются вершинами эллипса. Оси симметрии эллипса (оси Ox и Oy) называют осями эллипса. Точка пересечения осей ─ центр эллипса. Осями называют также отрезки A1A = 2a, B1B = 2b. Отрезки OA = a, OB = b и их длины называют полуосями. В нашем случае a > b, поэтому а называют большой полуосью, b ─ малой полуосью. Эксцентриситетом эллипса называется отношение фокусного расстояния к длине большой оси, т.е. .
. = 1 или x2 + y2 = a2
= 1 или x2 + y2 = a2 Из школьного курса известно уравнение окружности радиуса R с центром в точке A0(x0, y0):
Из школьного курса известно уравнение окружности радиуса R с центром в точке A0(x0, y0): 
 = 1 (2)
= 1 (2) Уравнение (2) называют каноническим уравнением гиперболы. Гипербола с уравнением (2) изображена на рис. 4.5.
Уравнение (2) называют каноническим уравнением гиперболы. Гипербола с уравнением (2) изображена на рис. 4.5. x и y = -
x и y = - 
 .
. Определение 4.3. Параболой называется множество всех точек плоскости, каждая из которых находится на одинаковом расстоянии от данной точки, называемой фокусом, к данной прямой, называемой директрисой, и не проходящей через фокус.
Определение 4.3. Параболой называется множество всех точек плоскости, каждая из которых находится на одинаковом расстоянии от данной точки, называемой фокусом, к данной прямой, называемой директрисой, и не проходящей через фокус. ; 0), где p > 0 и пусть она будет фокусом. Директрисой будет прямая x = -
; 0), где p > 0 и пусть она будет фокусом. Директрисой будет прямая x = -  ; y). По определению 4.3
; y). По определению 4.3 =
=  ,
, 
 =
=  , т.к. x ≥ 0.
, т.к. x ≥ 0. ,
,  Точка O называется вершиной параболы, ось симметрии ─ осью параболы.
Точка O называется вершиной параболы, ось симметрии ─ осью параболы. 


 (1)
(1) есть квадратная матрица второго порядка, А матрица
есть квадратная матрица второго порядка, А матрица  есть квадратная матрица третьего порядка.
есть квадратная матрица третьего порядка. , В =
, В =  и а11 = b11, a12 = b12, a21 = b21, a22 = b22, то А = В.
и а11 = b11, a12 = b12, a21 = b21, a22 = b22, то А = В. , В =
, В = 
 =
=  ─
─  =
= 

 =
=  ;
; 
 =
=  ;
; 
 =
=  .
.
 сделать все строки столбцами с тем же номером, то получим матрицу
сделать все строки столбцами с тем же номером, то получим матрицу которую называют транспонированной к матрице А.
которую называют транспонированной к матрице А. , В =
, В = 
 +
+  = 2
= 2  +
+  =
=  +
+ =
= 








 = (по элементам второго столбца) = 1× (-1)1+2
= (по элементам второго столбца) = 1× (-1)1+2  + 2 × (-1)2+2
+ 2 × (-1)2+2  +
+ = - (0 + 15) + 2(-2 +20) + (-6 +0) = -15 +36 – 6 = 15.
= - (0 + 15) + 2(-2 +20) + (-6 +0) = -15 +36 – 6 = 15.
 Аi1 +
Аi1 +  Ai2 + … +
Ai2 + … +  Ain =
Ain =  А1j +
А1j +  A2j + … +
A2j + … +  Anj
Anj = (по элементам 4-й строки) = 3× (-1)4+2
= (по элементам 4-й строки) = 3× (-1)4+2  +
+ = 3(-6 + 20 – 2 – 32) +2(-6 +16 +60 +2)=3(-20) +2× 72 = -60 +144 = 84.
= 3(-6 + 20 – 2 – 32) +2(-6 +16 +60 +2)=3(-20) +2× 72 = -60 +144 = 84. = 1 × │ En-1│ = … = │ E3│ = 1
= 1 × │ En-1│ = … = │ E3│ = 1 или
или 
 =
=  =
= 
 =
=  =
= 
 =
= 
 = 6 + 1 = 7.
= 6 + 1 = 7.
 .
. (1)
(1) ,
,  , С =
, С =  , то систему (1) можно записать в виде матричного уравнения АХ=С.
, то систему (1) можно записать в виде матричного уравнения АХ=С.






 Ответ: (2; -3; -1).
Ответ: (2; -3; -1). Ответ: нет решений.
Ответ: нет решений. Ответ: бесконечно много решений.
Ответ: бесконечно много решений. в этом случае. Иногда векторы обозначают малыми буквами
в этом случае. Иногда векторы обозначают малыми буквами  ,
,  и т.д.
и т.д. Модулем вектора
Модулем вектора  или
или  . Нуль-вектор ( или нулевой вектор) ─ это вектор, начало и конец которого совпадают; обозначается он
. Нуль-вектор ( или нулевой вектор) ─ это вектор, начало и конец которого совпадают; обозначается он  . Модуль нуль-вектора равен нулю, а направление не определено. Единичным называется вектор, длина которого равна единице.
. Модуль нуль-вектора равен нулю, а направление не определено. Единичным называется вектор, длина которого равна единице. называются компланарными, если они лежат в одной плоскости.
называются компланарными, если они лежат в одной плоскости. (рис.7). Пусть А1 ─ проекция точки А на ось ℓ, В1 ─ проекция точки В на ось ℓ.
(рис.7). Пусть А1 ─ проекция точки А на ось ℓ, В1 ─ проекция точки В на ось ℓ.