
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
АВТОМАТИЗИРОВАННЫЕ ИНФОРМАЦИОННО – УПРАВЛЯЮЩИЕ СИСТЕМЫСтр 1 из 9Следующая ⇒
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ Государственное образовательное учреждение высшего профессионального образования «Томский политехнический университет»
В. Н. Скороспешкин АВТОМАТИЗИРОВАННЫЕ ИНФОРМАЦИОННО – УПРАВЛЯЮЩИЕ СИСТЕМЫ
Курс лекций
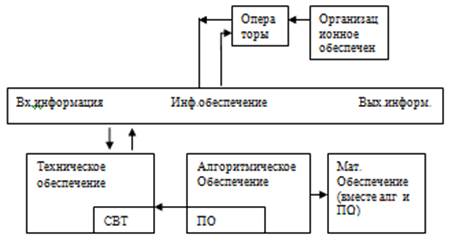
Томского политехнического университета I Основные понятия о Автоматизированной Системе Управления (АСУ) АСУ - это человеко-машинная система, обеспечивающая автоматизированный сбор и обработку информации, необходимый для оптимизации управления в различных сферах человеческой деятельности. Различают АСУ производственного и организационного типа. К АСУ производственного типа относят: автоматизированные системы управления предприятиями (АСУП) MES – systems, автоматизированные системы управления технологическими процессами (АСУ ТП) и интегрированные АСУ (ИАСУ). Особенности АСУП: 1. Доминирующее значение в АСУ имеют экономические задачи управления задачи снабжения, реализации, управления финансовыми средствами, трудовыми ресурсами, бухгалтерский учет и статическая отчетность. 2. В АСУП используются специфические формы хранения и движения информации – документооборот. В качестве управляющих воздействий в АСУП выступают документы в виде приказов, распоряжений, графиков, отчетов и т.д. 3. Реализация управляющих воздействий возлагается на рабочих и служащих. Особенности АСУ ТП: 1. В АСУ ТП применяется большой объем технических средств (АСУП использует большинство вычислительных процессов). 2. АСУП может быть отнесена к классу АСУ ТП только в том случае, если система осуществляет воздействие на объект в том же темпе, что протекающие в нем технологические процессы. Другими словами АСУ ТП функционирует в режиме реального времени. 3. Цель функционирования АСУ ТП – оптимизация работы объекта управления путем формирования и реализации управляющих воздействий. АСУП и АСУ ТП могут функционировать самостоятельно, либо могут объединяться в одну систему, которая называется интегрированная АСУ (ИАСУ). ИАСУ обеспечивает взаимосвязанное и согласованное управление как технологией, так и организацией производства в масштабах всего предприятия. Цели создания АСУ ТП Наиболее важные цели в создании АСУ ТП: 1. Обеспечение безопасности функционирования технологических процессов. То есть устранение аварий, связанных с несогласованностью операторов и длительностью времени их реакции. 2. Сокращение стоимости систем контроля и управления за счет исключения из числа используемых при работе дорогостоящих вторичных показывающих и регистрирующих приборов и локальных регуляторов. 3. Снижение стоимости выпускаемой продукции, увеличение производительности, повышение качества достигается за счет оптимизации режимов работы технологического оборудования и использования оптимальных систем управления. Состав АСУ ТП АСУ ТП состоит из технического, математического, информационного, организационного обеспечений. Техническое обеспечение включает в себя технические средства (средства измерений технических параметров, исполнительные устройства, промышленные микропроцессорные контроллеры, компьютеры, регистраторы, источники питания, каналы связи и т.д.). Математическое обеспечение делится на: 1. алгоритмическое - комплекс взаимосвязаных алгоритмов функционирования АСУ ТП. 2. программное - совокупность программ по которым работает УВК. Информационное обеспечение - это комплекс документов, в которых приводиться перечень входных сигналов и данных и их характеристик, перечень выходных сигналов и документов, а также схемы сбора, обработки и использования информации. Организационное обеспечение включает в себя документы необходимые для работы оперативного и обслуживающего персонала для эксплуатации АСУ ТП (инструкции операторам, инструкции по ремонту, паспорт системы и описание АСУ ТП). Схема взаимосвязи отдельных видов обеспечения:
СВТ – средства вычислительной техники; ПО – программное обеспечение. Функции АСУ ТП Функции АСУ ТП - это совокупность действий системы, направленных на достижения частной цели управления. Различают информационно-вычислительные и управляющие функции. К информационно - вычислительным относят такие функции, результатом выполнения которых является предоставление оператору информации о ходе ТП. Управляющие функции включают в себя действия по выработки и реализации управляющего воздействия на ОУ Перечень информационно-вычислительных функций: 1. Прямое измерение (сбор, первичная обработка и хранение информации об ОУ). 2. Косвенное измерение параметров процесса и технологического оборудования (ТО). 3. Сигнализация состояний параметров ТП и ТО. 4. Расчет технико-экономических и эксплуатационных показателей ТП и оборудования. 5. Регистрация параметров ТП, параметров ТО и результатов расчётов. 6. Контроль и регистрация отклонений параметров ТП и состояния оборудования. 7. Анализ срабатывания блокировки и защит ТО (определения причин нарушения хода ТП). 8. Диагностика и прогнозирование хода ТП и состояния ТО. 9. Диагностика и прогнозирование состояния комплекса тех средств АСУ ТП. 10. Оперативное отображение информации ведения ТП. 11. Выполнения процедур автомат обмена инфо со смежными и вышестоящими СУ. Не все перечисленные функции могут быть реализованы в конкретной АСУ ТП. Это зависит от функциональной развитости АСУ ТП. Перечень функций, определяется при составлении технического задания на проектировании, и при этом учитываются требования, указанные в руководящих материалах (обычно отраслевых). Перечень управляющих функций: 1. Одноконтурное регулирование. 2. Логическое управление. 3. Каскадное регулирование. 4. Многосвязное регулирование. 5. Программное управление. 6. Оптимальное управление установившимися режимами работы ТП (определяются уставки регуляторов, расчет технических параметров). 7. Оптимальное управление неустановившимися режимами работы ТП (оптимальное управление в динамике) – поиск закона изменения параметра, поиск траектории от одного установившегося значения к другому. 8. Оптимальное управление с адаптацией. Не все перечисленные функции могут быть реализованы в конкретной АСУ ТП. Реализация функций АСУ ТП как управляющих, так и информационно вычислительных осуществляется с помощью микропроцессорных контроллеров и операторных станций, выполненных на базе компьютеров.
Типовая структура АСУ ТП
Обозначения рисунка: ИС – инженерная станция. ОС – операторская станция. ПМК – промышленный микропроцессорный контроллер. Контроллеры выполняют следующие функции: 1. управляющие; 2. сигнализацию; 3. сбор и первичную обработку информации; 4. косвенное деление измерение; 5. автоматический обмен между информацией с операторскими и диспетчерскими станциями. Операторские станции выполняют следующие функции: 1. регистрация информации (архивирование); 2. оперативное отображение в различных видах (в цифровом, табличном, графическом, в виде мнемосхем, содержащих статическую и динамическую часть); 3. подготовка отчетных документов; 4. оперативное дистанционное управление (включение, отключение оборудования, изменение уставок регулятора, подготовка программ по которым работают контроллеры, их загрузка в контроллер и диагностика исправности контроллеров). ОРС – сервер обеспечивает обмен информации между операторскими станциями и контроллерами. Классификация АСУ ТП АСУ ТП классифицируется по следующим признаком: 1. По функциям, выполняемым вычислительным комплексом (ВК). 2. По уровню занимаемому АСУ в организационно-производственной иерархии. 3. По характеру протекания управляющего процесса во времени. 4. По показателю условной информационной мощности (УИМ) ОУ. 5. По степени функциональной развитости АСУ ТП. 6. По характеру структуры АСУ ТП.
1. Разновидность АСУ ТП в зависимости от функций, выполняемым ВК · АСУ ТП с ВК, выполняющим информационные функции. · АСУ ТП с ВК, выполняющим управленческие функции в режиме «советчика оператора». · АСУ ТП с ВК, выполняющим функции центрального управления устройства (с ВК, работающим в супервизорном режиме). · АСУ ТП с ВК, выполняющим функции непосредственного цифрового управления Структура неавтоматизированной локальной системы управления:
Источники информации: 1. Средства индивидуального контроля. Представляют собой показывающие, регистрирующие и самопишущие приборы, применяющиеся для получения информации о наиболее важных параметрах, которые определяют качество выпускаемой продукции и влияют на безопасность процесса. 2. Средства контроля по вызову. Представляют собой многоканальные приборы, применяющиеся для контроля однотипных параметров, характеризующих состояние технологических процессов. 3. Средства массового контроля. Используется для контроля вспомогательных параметров с малой вероятностью отклонения от заданных значений. 4. Средства сигнализации (сирена). Исполнительные устройства: 1. Автоматические регуляторы. 2. Средства защиты. 3. Средства блокировки. 4. Средства дистанционного ручного управления. Структура АСУ ТП с ВК, работающим в информационном режиме:
вх управляющие выходные потоки ИИ – источники информации УЛУ – устройство логического управления
Система данного вида содержит все технические средства присущие неавтоматизированной системе и отличается лишь наличием ВК, который обеспечивает более полной информацией оператора: определяет комплексно – технические, технико – экономические параметры, а также обеспечивает контроль работы и состояния оборудования. Достоинство данной системы - повышение качества управления. Основной недостаток такой системы – высокая стоимость, так как наряду с ВК используются средства локальной автоматики. Такие АСУ ТП применяются в тех случаях, когда необходимо обеспечить высокую надёжность. Структура АСУ ТП с ВК, работающим в режиме советчика:
вх управляющие выходные потоки ИИ – источники информации УЛУ – устройство логического управления
АСУ ТП с ВК в режиме советчика имеет ту же структуру, что и в информационном режиме, но отличается тем, что оператору предоставляется информация не только о ходе ТП, но и совет по управления. Недостаток данной АСУ ТП такой же - высокая стоимость, а достоинством является то, что качество управления может быть менее квалифицированным (возможность воспользоваться советом). Структура АСУ ТП с ВК, работающим в «супервизорном» режиме:
вх управляющие выходные потоки ИИ – источники информации УЛУ – устройство логического управления
В системе данного вида ВК кроме информации передаваемой оператору осуществляется расчет уставок оператора, что позволяет реализовывать оптимальное управление. Число контуров может быть гораздо больше, чем в системе в режиме «советчика» и информационном режиме, так как оператор исключается из системы управления, что является, несомненно, достоинством таких систем. Недостаток – высокая стоимость Структура АСУ ТП с ВК, работающим с функциями непосредственного центрального управления:
     вхуправляющие выходные потоки вхуправляющие выходные потоки
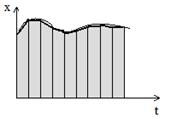
Характерная особенность данной системы заключается в том, что ВК кроме информации, передаваемой оператору, осуществляет расчет и выдачу на исполнительный механизм управляющих воздействий, при этом локальные регуляторы и УЛУ исключаются из системы. То есть ВК выполняет функции регуляторов. Достоинством является возможность реализации более сложных законов регулирования, чем П, ПИ, ПИД. Например, апериодический закон, регулятор с min-дисперсией, регулятор Ресвика, Смитта и др., позволяющие получить более высокое качество регулирования (в процессе работы можно менять параметры регулятора, а при необходимости структуру). В процессе работы можно менять как параметры регуляторов, так и законы регулирования. Стоимость этой системы гораздо ниже, чем с супервизорным управлением, из-за исключения локальных регуляторов. Недостатком является невысокая надёжность – при выходе из строя ВК (если система централизованная) система теряет работоспособность. Для повышения надёжности применяют резервирование (два ВК), либо используют децентрализованные системы. Т.е. используются несколько ВК, управляющие отдельными частями технологического процесса. В таких системах могут присутствовать межтактовые колебания регулируемой величины из-за ступенчатого характера регулируемой величины. 2. Разновидность АСУ ТП по уровню занимаемому системой в организационной производственной иерархии Различают следующие АСУ ТП:
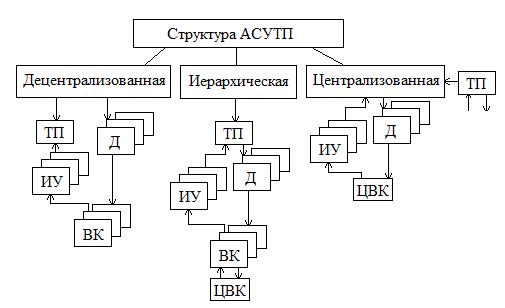
К системам нижнего уровня относят АСУ ТП, управляющие агрегатами, установками, не имеющие в своем составе АСУ ТП. К АСУ ТП верхнего уровня относят АСУ ТП, управляющие группами установок, цехами и производствами, у которых отдельные участки (агрегаты, установки) оснащены своими АСУ ТП нижнего уровня. 3. Разновидность АСУ ТП по характеру протекания управляющего процесса во времени Различают АСУ непрерывным технологическим процессом (ТП), дискретным ТП и непрерывно – дискретным ТП. Дискретный характер имеют процесс машиностроения, приборостроения. В таких процессах используются робототехнические комплексы, которые позволяют создавать гибкие автоматизированные комплексы. К производствам, имеющим непрерывный характер относят: · транспортировку нефти и газа; · выработку, распределение электроэнергии; · производство нефтехимическое, химических продуктов. К процессам непрерывно – дискретного цикла относят вопросы электронной, цементной и других отраслях. Такие процессы характеризуются наличием циклов непрерывных и дискретных. 4. Разновидность АСУ ТП по показателю условной информационной мощности объекта управления Условная информационная мощность объекта управления (УИМ ОУ) и его АСУ ТП, характеризуется числом контролируемых параметров. В зависимости от этих показателей делятся: 1) УИМ малая (число контролируемых параметров не более 40). 2) УИМ пониженная (число контролируемых параметров 41-160). 3) УИМ средняя (число контролируемых параметров 161-650). 4) УИМ повышенная (число контролируемых параметров 651-2500). 5) УИМ высокая (число контролируемых параметров более 2500). 5. Разновидность АСУ ТП по степени функциональной развитости АСУ ТП Степень функционально развитости определяется двумя наиболее сложными функциями АСУ ТП, реализуемыми в системе. 6. Разновидность АСУ ТП по характеру структуры АСУ ТП
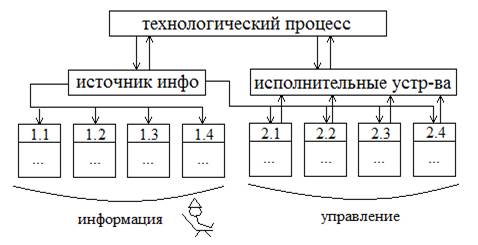
Обозначение рисунка: ТП – технологический процесс. Д – датчики. ИУ – исполнительные устройства. ЦВК – центральный вычислительный комплекс. · Системы с централизованной структурой отличаются высоким качеством управления, так как вся информация о процессе находится в ВК. Недостатком является невысокая надежность. · Системы с децентрализованной структурой характеризуются наличием нескольких ВК, каждый из которых управляет отдельной частью ТП. Согласование комплексов осуществляется на этапе пуска системы в работу. Характеризуются системы высокой надежностью, недостатком является – не высокое качество, так как в процессе работы согласование не производится. · Иерархическая (многоуровневая) система характеризуется наличием локальных ВК и наличием ЦВК (центральный вычислительный комплекс), в котором находится вся информация о работе ТП, что позволяет вести согласованное управление - координатор. Достоинство – высокая надежность, несколько ВК, высокое качество. Недостаток – больше стоимость, чем у остальных систем.
Робастные фильтры Фильтры данного типа предназначены для фильтрации аномальных выбросов. К числу робастных фильтров относят медианный фильтр, фильтр релейно – экспоненциального сглаживания. Медианный фильтр Реализация медианного фильтра осуществляется по формуле: med – оператор, означающий операцию оценки медианы. Оценка медианы проводится по следующему алгоритму: Проводится упорядочение отсчетов При нечетном М в качестве медианы выбирается центральное значение этого ряда. При четном значении в качестве медианы выбирается полусумма двух средних значений ряда. Учёт динамический связей Наличие инерционного датчика может существенно исказить частотный состав измеряемого сигнала, например, при измерении температуры в печах применяют массивные чехлы для защиты термопар от механических повреждений, что вызывает значительную динамическую погрешность. Если принять статический коэффициент передачи инерционного датчика равный единице, то есть Метод прямоугольников.
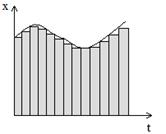
Суть метода состоит в замене реализации x(t) её ступенчатой экстраполяцией за время t.
В представленном виде алгоритм интегрирования используется редко, для его реализации требуется запоминать все значения
Метод трапеций. Более точным является метод трапеции. Рекуррентная формула: Погрешность метода трапеции меньше погрешности метода прямоугольников на величину:
Как показывают расчеты приблизительно на 10% уменьшается погрешность дискретного интегрирования при переходе от метода прямоугольника к методу трапеции при n> 10, когда существеннее влияние на результат расчета оказывают кратные числа, следовательно, на практике в большинстве случаев используют метод прямоугольников, как более простой и экономичный. Среднее значение определяется через интегральное:
Дифференцирование дискретно – измеряемых величин. Для анализа хода технологического процесса весьма важным является определение не только численных значений параметров, но и тенденция их применения в текущий момент времени (увеличивается параметр или уменьшается). В этом случаи необходимо определять скорость изменения параметра, то есть осуществлять дифференцирование. Производная от ошибки необходимо определять и при реализации регулятора, например с ПД, ПИД звеньями. Наиболее простой алгоритм дискретного дифференцирования основан на использовании следующей функции: Алгоритмы контроля Понятие контроль более широкое понятие и включает в себя измерение величин и показателей и сравнение их с допустимыми пределами. Рассмотрим общие и частные постановки задачи определения величин и показателей. Общая постановка: Задана совокупность величин и показателей, которые необходимо определить в объекте контроля. Указана требуемая точность их оценки. Имеется совокупность датчиков, которые установлены или могут быть установлены на автоматизированном объекте. Требуется для каждого отдельного показателя найти группу датчиков, частоту их опроса и алгоритмы обработки, получаемых от них сигналов. В результате чего значение этой величины определилось бы с требуемой точностью. Точность оценки искомой величины определяется точностью работы измерительных цепей (датчика, преобразователя), частотой их опроса и точностью вычислительной переработки измерительных сигналов в искомую величину. Частные постановки: Виды контроля Общей функцией автоматического контроля является фиксация хода технологического процесса во времени и непрерывное (периодическое) сравнение параметров процесса с заданными. Различают следующие виды контроля: 1. Контроль технологических процессов в нормальном режиме. 2. Контроль качества выпускаемой продукции. 3. Контроль процесса при выходе его на номинальный уровень мощности. 4. Контроль исправности оборудования. 5. Контроль включения/выключения оборудования. 6. Контроль производительности оборудования. 7. Контроль над процессом в аварийных режимах. Основная операция контроля состоит в том, что для каждого контролируемого параметра x(ti) в момент времени t необходимо проверять выполнение условия: Все контролируемые параметры можно разбить на три группы: 1. Параметры, требующие непрерывного контроля. 2. Параметры, нуждающиеся в периодическом контроле. 3. Свободные показатели процесса. Непрерывный контроль из-за дискретного характера процесса измерения в автоматических системах осуществить невозможно, так как встает вопрос о шаге дискретизации (период опроса). Этот шаг должен выбираться из условия: Чтобы максимум изменения параметра на отрезке времени t0 не превышало некоторой заданной положительной величины К параметрам, нуждающимся в периодическом контроле относятся такие параметры, для которых в некоторый момент времени допустим выход за установленные пределы. Для таких параметров на j – ом шаге контроля проверяется условие: Свободные показатели процесса – это некоторые функции параметров, которые необходимо контролировать: III Цифровые регуляторы Цифровые регуляторы можно реализовать аппаратно или программно. Аппаратно: используются локальные регуляторы, которые выполняются в виде отдельного устройства с выносным или встроенным задатчиком, а также органами индикации и сигнализации. Программно: функции формирования управляющего воздействия выполняют микропроцессорные устройства, которые способны реализовывать не только П, ПИ, ПИД законы, но и более сложные законы, обеспечивающие высокое качество. Также к достоинствам цифровых регуляторов моно отнести возможность изменения в процессе работы параметров настройки, а также закона регулирования. Программная реализация дешевле, чем аппаратная. К недостатком можно отнести, возможно, внештатные колебание регулируемой величины из-за дискретного характера изменения управляющего воздействия. Цифровые регуляторы бывают двух видов. 1. Параметрические оптимизируемые регуляторы - это регуляторы заданной структуры и в процессе синтеза меняются параметры. При синтезе таких регуляторов задается структура ( П, ПИД, ) и определяются параметры обеспечивающие необходимые качества системы. 2. Структурно оптимизируемые регуляторы – регуляторы, которые в процессе синтеза могут менять как структуру, так и параметры, которые зависят от свойств объекта управления и свойств возмущающих воздействий. Параметрические оптимизируемые регуляторы. Наибольшее распространение получили П, ПИ, ПИД регуляторы.Для реализации цифровых регуляторов необходимо знать разностное уравнение. Получить разностное уравнение можно с использованием дискретной передаточной функции и на основе дискретизации ДУ. Получим разностное уравнение ПИД - регулятора, основываясь на дискретизации его уравнения. Уравнение аналогового ПИД - регулятора
 
Апериодический регулятор В отличие от непрерывных, цифровые регуляторы позволяют устранять внештатные колебания, то есть установить заданное качество управления только в тактовые моменты времени. Между тактами могут возникать колебания регулируемой величины: Устранить внештатные колебания можно путем обеспечения апериодического характера переходного процесса. Пусть
… …
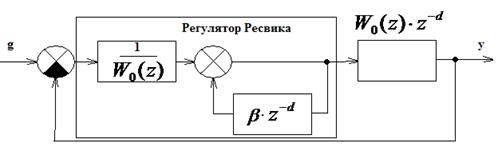
Регулятор с предвидением Регуляторы с предвидением используются для управления объектами с большим запаздыванием, т.е. для управления объектами, имеющими ПФ: При больших При переходе к дискретной ПФ определяем величину Условие исключения запаздывания имеет вид: Из этого условия следует, что Такими же свойствами обладает система со структурой: регулятор Смита Структурная схема САУ с регулятором Ресвика:
Необходимы вычисления, поэтому ранее не использовались. Сейчас, когда есть контроллеры, используются чаще. Параметр настройки: Назначение Контроллер предназначен для общепромышленного применения в составе автоматизированных систем управления технологическими процессами в различных отраслях промышленности - энергетической, металлургической, химической, нефте- и газодобывающей, машиностроительной, сельскохозяйственной, пищевой и т.д. Может использоваться также в качестве автономных средств управления объектами малой и средней скорости. Наличие сертификата для использования при автоматизации взрывопожароопасных объектов. Является средством измерения.
Функции · Измерение сигналов, поступающих от датчиков. · Первичная обработка сигналов. · Регулирование. · Выполнение функциональных преобразований (математических, динамических, логических и других). · Хранение программ во flash – памяти и в энергонезависимом ОЗУ. · Реализация функции сигнализации и защиты. · Программно – логическое управление. Состав Контроллер имеет проектно – компонуемый состав. 1. Базовый монтажный блок. В этот блок устанавливается микропроцессорный модуль, субмодуль Ethernet, модули интерфейсной связи ИСК 1 (для связи с модулями УСО) и модуль питания. 2. Модули ввода/вывода аналоговых и дискретных сигналов. 3. Терминальные блоки, предназначенные для подключения входных и выходных сигналов к модулям УСО. 4. Гибкие соединители (плоские кабели). Модули УСО Контроллер может иметь следующие модули: · TC1-7 – предназначен для работы с термопарами (имеет 7 входов для подключения термопар и 1 вход для термосопротивления, для учета температуры свободных концов). Типы термопар: ТХА, ТХК, ТВР, ТПП, ТПР, ТЖК, ТМК. Максимальная погрешность: 0.8 – 3.5 0С. · TR1-8 – предназначен для работы с термосопротивлениями (ТМ100, ТСМ50, ТСП50). Максимальная погрешность: 0.3 – 0.50С. · AI1-8 – аналоговый вход аналоговых сигналов. Типы сигналов: напряжение: 0 – 10 В; ток: 0 – 5 мА, 0 – 20 мА, 4 – 20мА. Максимальная погрешность: ±0.2%. · AIO1-8/0, AIO1-8/4 – аналоговый ввод, без вывода и аналоговый ввод/вывод соответственно. Имеются модули ввода/вывода только токовых сигналов. · AIO1-0/4, AIO1-0/8 – аналоговый ввод/вывод. Назначение Контроллер предназначен для создания АСУ ТП в различных отраслях промышленности, может применяться для автоматизации взрывопожароопасных производств, является средством измерения. Состав Проектно-компонуемый контроллер. В состав могут входить следующие блоки и модули: 1. БЦП предназначен для организации и управления вычислительными процессами в реальном времени, исполнения технологической программы пользователя (ТПП). 2. Модули ввода – вывода постоянного состава (дискретные (DI1-16, DIO1-8/8), аналоговые (TC1-7, AI1-8, AIO1-8/4)) и проектно-компонуемого состава (ADIO1, AIO2). Проектно – компонуемого состава имеет в виде, что к БЦП могут подключаются удаленные модули ВВ аналоговых и дискретных сигналов: ADI01 (через RS485), аналоговый AI02. Эти модули имеют по 8 ячеек ВВ. 3. Микроконтроллер программируемый МК1 выполняет все функции МВВ, а также различные дополнительные функции управления: исполнение ТПП, обмен с МВВ и верхним уровнем Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 5264; Нарушение авторского права страницы

 АР – автоматический регулятор (локальные)
АР – автоматический регулятор (локальные)







 ИИ – источники информации
ИИ – источники информации







 АР – автоматический регулятор (локальные)
АР – автоматический регулятор (локальные)
 , где М – параметр настройки,
, где М – параметр настройки,  в ряд по возрастанию.
в ряд по возрастанию. при
при  , то необходимо учитывать следующую связь:
, то необходимо учитывать следующую связь:  , т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени
, т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени  .
.
 ,
,  , где
, где  - период опроса датчика.
- период опроса датчика. . На практике используется рекуррентная формула:
. На практике используется рекуррентная формула:  ,
,  .
. .
.
 .
. , где
, где - время интегрирования.
- время интегрирования. , где Т0 – период опроса датчика.
, где Т0 – период опроса датчика. , где
, где  - число параметров, mi – нижний допустимый предел изменения i-го параметра, Mi – верхний допустимый предел.
- число параметров, mi – нижний допустимый предел изменения i-го параметра, Mi – верхний допустимый предел. .
. . С учетом этого условия непрерывного контроля сводится к проверке неравенства:
. С учетом этого условия непрерывного контроля сводится к проверке неравенства:  .
. , где t0 – усредненное значение за период времени
, где t0 – усредненное значение за период времени  ,
,  - начало отсчета времени.
- начало отсчета времени. ,
,  . Обычно на практике свободные показатели требуют периодического контроля.
. Обычно на практике свободные показатели требуют периодического контроля. КП – коэффициент пропорциональности
КП – коэффициент пропорциональности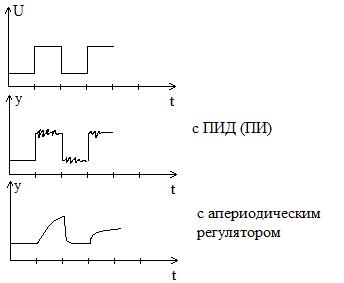
 , тогда апериодический характер будет обеспечиваться регулятором:
, тогда апериодический характер будет обеспечиваться регулятором:  .
. ;
;  ;
;  ;
;  ;
;  ;
;  .
.  .
. .
. обычные параметрически – оптимизированные регуляторы не обеспечивают устойчивость.
обычные параметрически – оптимизированные регуляторы не обеспечивают устойчивость. , где d – число тактов запаздывания. На практике используются регуляторы Ресвика и Смита. Получим структуру регулятора Смита:
, где d – число тактов запаздывания. На практике используются регуляторы Ресвика и Смита. Получим структуру регулятора Смита: 
 .
. . Этой ПФ соответствует:
. Этой ПФ соответствует: 

 . Особенность регуляторов с предвидением в том, что они плохо работают, когда модель объекта определена не точно или свойства меняются с течением времени.
. Особенность регуляторов с предвидением в том, что они плохо работают, когда модель объекта определена не точно или свойства меняются с течением времени.