
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Применение интерполяции и экстраполяции при контроле параметров и показателей
Процесс получения инфо о непрерывно-изменяющихся величинах в АСУ ТП происходит дискретно во времени, поэтому возникает задача восстановления значений измеряемых величин в моменты времени, несовпадающие с моментами замеров. Для управления, когда необходимо знать значение измеряемой величины в текущий или будущий момент времени используется метод экстраполяции значения величины, полученной в предшествующий момент времени. Для анализа работы производства и вычисления технико-экономических показателей необходимо определить значение величин в предшествующие моменты времени, в этом случае используются методы интерполяции. В большинстве случаев экстраполяцию осуществляют ступенчатым методом. При ступенчатой экстраполяции о значении измеряемой величины в любой текущий момент времени судят по измеренному значению величины последней токи замера. Погрешность ступенчатой экстраполяции: где T0 - период опроса датчика;
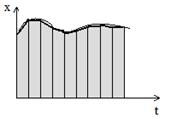
Таким образом, погрешность ступенчатой экстраполяции зависит от статических свойств измеряемой величины, периода опроса и погрешности измерительного канала, что необходимо учитывать при выборе периода опроса. Для интерполяции чаще всего применяется кусочно-линейная аппроксимация, которая проводится по двум точкам с использованием следующей формулы: Менее точной является ступенчатая интерполяция. Учёт динамический связей Наличие инерционного датчика может существенно исказить частотный состав измеряемого сигнала, например, при измерении температуры в печах применяют массивные чехлы для защиты термопар от механических повреждений, что вызывает значительную динамическую погрешность. Если принять статический коэффициент передачи инерционного датчика равный единице, то есть Алгоритмы вторичной обработки информации К основным операциям вторичной обработки относят: · определение интегральных и средних значений величин и показателей; · определение скорости изменения величины и показателей; · определение величин и показателей, неизмеряемых прямым методом (косвенное измерение); · прогнозирование значений величин; · определение статических характеристик, величин и показателей. Применяются для управления и анализа работы. Большое значение имеет определение суммарных количеств вещества или энергии, получаемых в производстве за определенный интервал времени. Примерами являются расходы электроэнергии, топлива за час, смену, сутки и так далее. Этим же целям служит определение средних значений измеряемых величин, являющихся режимными показателями (среднее время, среднее давление и т.д.) Рассмотрим методы дискретного интегрирования, непрерывно изменяющейся во времени измеряемой величины. Далее приведены численные методы интегрирования. Метод прямоугольников.
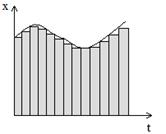
Суть метода состоит в замене реализации x(t) её ступенчатой экстраполяцией за время t.
В представленном виде алгоритм интегрирования используется редко, для его реализации требуется запоминать все значения
Метод трапеций. Более точным является метод трапеции. Рекуррентная формула: Погрешность метода трапеции меньше погрешности метода прямоугольников на величину:
Как показывают расчеты приблизительно на 10% уменьшается погрешность дискретного интегрирования при переходе от метода прямоугольника к методу трапеции при n> 10, когда существеннее влияние на результат расчета оказывают кратные числа, следовательно, на практике в большинстве случаев используют метод прямоугольников, как более простой и экономичный. Среднее значение определяется через интегральное:
Дифференцирование дискретно – измеряемых величин. Для анализа хода технологического процесса весьма важным является определение не только численных значений параметров, но и тенденция их применения в текущий момент времени (увеличивается параметр или уменьшается). В этом случаи необходимо определять скорость изменения параметра, то есть осуществлять дифференцирование. Производная от ошибки необходимо определять и при реализации регулятора, например с ПД, ПИД звеньями. Наиболее простой алгоритм дискретного дифференцирования основан на использовании следующей функции: Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1135; Нарушение авторского права страницы
 ,
,  - автокорреляционная функция (устанавливает степень связи);
- автокорреляционная функция (устанавливает степень связи);  - погрешность измерительного преобразования.
- погрешность измерительного преобразования.

 при
при  , то необходимо учитывать следующую связь:
, то необходимо учитывать следующую связь:  , т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени
, т.е. в текущий момент времени на выходе датчика формируется сигнал несущий информацию о значении параметра в предшествующий момент времени, т.е. в момент времени  .
.
 ,
,  , где
, где  - период опроса датчика.
- период опроса датчика. . На практике используется рекуррентная формула:
. На практике используется рекуррентная формула:  ,
,  .
. .
.
 .
. , где
, где - время интегрирования.
- время интегрирования. , где Т0 – период опроса датчика.
, где Т0 – период опроса датчика.