
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
АКСИОМЫ СТАТИКИ. СВЯЗИ И ИХ РЕАКЦИИ. ТРЕНИЕ. КЛАССИФИКАЦИЯ СИЛСтр 1 из 13Следующая ⇒
ВВЕДЕНИЕ Предмет теоретической механики. Основные понятия Механикой называется наука о простейшей форме движения материи — о механическом движении. Простейшими являются движения, сводимые к перемещениям во времени физических тел из одного положения в пространстве в другое. Теоретическая механика изучает наиболее общие законы механического движения. Она не учитывает индивидуальные свойства физических тел, за исключением двух: свойства протяженности и свойства гравитации (свойства частиц материи тяготеть друг к другу или обладать весом). К числу основных понятий относится механическая сила. Механическая сила есть движение, в механической форме передаваемое от одного тела к другому при их взаимодействии. Многочисленные наблюдения показали, что сила характеризуется величиной, направлением и точкой приложения. Сила относится к векторным величинам. По своему построению теоретическая механика напоминает геометрию: в ее основе также лежат определения, аксиомы и теоремы. Теоретическую механику принято делить на статику, кинематику и динамику. В статике изучаются методы преобразования сил, приложенных к материальной точке и абсолютно твердому телу, а также условия их равновесия. Кинематикой называется раздел теоретической механики, в котором изучается механическое движение без учета действующих сил. Изучением механического движения материальной точки, системы и абсолютно твердого тела с учетом действующих сил занимается динамика. АКСИОМЫ СТАТИКИ. СВЯЗИ И ИХ РЕАКЦИИ. ТРЕНИЕ. КЛАССИФИКАЦИЯ СИЛ Краткие сведения о развитии статики Научные основы статики заложены сиракузским механиком и математиком Архимедом (287 — 212 гг. до н. э.). Он предложил теорию равновесия рычага, находящегося под действием параллельных сил. Им создано учение о центре тяжести. Исследовав равновесие плавающих в жидкости тел, Архимед заложил основы гидростатики. В своих исследованиях по механике он подвел итоги существовавших до него знаний в области статики и привел их в строго логическую систему. В период средневековья в статику ничего нового не было внесено. Эпоха Возрождения ознаменовалась развитием, как статики, так и динамики. Большой вклад в геометрическую статику внес французский ученый — современник Ньютона — П. Вариньон (1654 — 1722). В завершении геометрической статики решающую роль сыграл французский ученый Л. Пуансон (1777—1859). Основоположником аналитической статики был великий 'французский ученый Ж. Лагранж (1736 — 1813). Дальнейшее развитие аналитической статики связано с именем великого русского математика и механика М. В. Остроградского (1801 — 1861). В обосновании аксиоматики статики большую роль сыграли Н. Е. Жуковский (1847—1921), С. А. Чаплыгин (1869— 1942) и В. Г. Имшенецкий (1832-1892). АКСИОМЫ СТАТИКИ Статика означает равновесие, приложенных к твердому телу. В статике рассматриваются две основные задачи: 1) замена дополнительной системы сил приложенных к твердому телу другой системой сил ей эквивалентной; 2) вывод общих условий, при которых твердое тело под действием приложенных к нему сил остаются в состоянии покоя или в состоянии равномерного прямолинейного поступательного движения. Тело называется абсолютно твердым если расстояние между любыми его точками не меняется. Материальной точкой называется тело, размерами которого в условиях данной задачи можно пренебречь. Совокупность тел, в том числе и материальных точек, каким то образом связанных между собой называют системой тел. Силы взаимодействия между телами, входящими в данную систему, называют внутренними, а силы, которые действуют на данную систему другие тела – внешними. Равнодействующей силой данной системы сил называется сила, механически эквивалентная этой системе сил. Силы, входящие в состав системы сил, называются составляющими силами. В дальнейшем равнодействующую силу будем обозначать буквой R. Уравновешивающая сила по величине равна равнодействующей силе, но направлена по той же прямой в противоположную сторону. В статике, решая вопрос о замене системы сил, действующих на абсолютно твердое тело, другой, ей эквивалентной, или вопрос о равновесии сил, пользуются геометрическими свойствами векторов сил. Отсюда становится понятным термин «геометрическая статика». Аналитическая статика, основанная на принципе возможных перемещений, будет изложена в динамике. Условия, при которых тело может находиться в равновесии, выводятся из нескольких основных положений применяемых без доказательств, но подтвержденных опытами, называются аксиомами статики. Аксиома I (аксиома инерции, или первый закон Ньютона) Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения то какие-нибудь силы не выведут тело из этого состояния. Способность тела сохранять свое состояние покоя или прямолинейного равномерного движения, называется инерцией или инертностью. Инертность есть одно из основных свойств материи. Аксиома II (аксиома взаимодействия, или третий закон Ньютона) Если одно тело действует на другое тело с некоторой силой, то второе тело одновременно действует на первое с силой равной по модулю, по противоположной по направлению. Аксиома III (условие равновесия двух сил) Для равновесия свободного твердого тела, находящегося под действием двух сил, необходимо и достаточно чтобы эти силы были равны по модулю и действовали по одной прямой в противоположные стороны. Аксиома IV Равновесие (как любой другое механическое состояние твердого тела не нарушится, если к нему приложить или удалить систему уравновешенных сил. Аксиома V (аксиома параллелограмма сил) Равнодействующая двух сил, приложенных к телу в одной точке, равна по модулю и совпадает по направлению с диагональю параллелограмма, построенного на данных силах, и приложена в той же точке.
Связи и их реакции В теоретической механике различают свободную материальную точку, свободную систему и свободное твердое тело, а также несвободную материальную точку, несвободную систему, несвободное твердое тело. Если на движение материальной точки, системы или твердого тела не наложены наперед заданные ограничения, то материальная точка, система или твердое тело называются свободными. В противном случае материальная точка, система или твердое тело называются несвободными. Физические условия, ограничивающие свободу движения указанных материальных объектов, называются связями. В статике встречаются простейшие связи, осуществляемые раз Сила, с которой связь действует на рассматриваемую точку, систему или твердое тело, называется реакцией связи. Виды связей и их реакции.
Связью может быть нить, шнур, веревка, цепь, трос и т. д. В теоретической механике принимают, что такие связи являются невесомыми, гибкими и Однако существуют такие связи, линии действия которых Он состоит из неподвижного цилиндрического болта (пальца), на который надевается втулка (рис. 4), имеющая цилиндрическое отверстие с диаметром, немного превышающим диаметр болта. Если тело скрепить с втулкой, то оно сможет только вращаться вокруг оси шарнира. В идеальном шарнире, в котором пренебрегают трением между поверхностями пальца и втулки, возникает только препятствие для перемещения втулки в направлении, перпендикулярном к поверхностям пальца и втулки. Поэтому реакция в идеальном шарнире направлена по нормали, т. е. по радиусу болта. В зависимости от действующих сил втулка может прижиматься к болту в любой точке. Поэтому направление реакции неподвижного цилиндрического шарнира наперед указать нельзя. Об этой реакции известно только то, что она расположена в плоскости, перпендикулярной к оси, шарнира. Схематически неподвижный шарнир изображают двумя стержнями, соединенными общим шарниром. При решении задач реакцию шарнира определяют аналитически, раскладывая ее по направлениям координатных осей. Величину проекций реакции определяют из уравнений равновесия. Аналогично поступают и в других случаях, когда направление реакции какой-то связи наперед указать нельзя.
Система сходящихся сил. Сходящихся сил Система сил, линии действия которых пересекаются в одной точке, называется системой сходящихся сил. Система сходящихся сил либо приводится к равнодействующей, либо находится в равновесии. Теорема. Равнодействующая системы сходящихся сил равна векторной сумме этих сил.
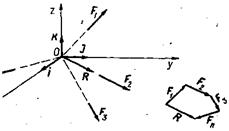
Действительно, пусть к абсолютно твердому телу приложена система сил F1, F2, ..., Fn, линии действия которых пересекаются в некоторой точке О (рис. 9). Мы могли бы складывать последовательно эти силы по аксиоме о параллелограмме сил. Однако этот путь очень длинен. Пользуясь правилом геометрического сложения векторов, сразу построим многоугольник сил F1, F2, ..., Fn, замыкающая сторона которого и будет равнодействующей силой R. Изложенный способ определения равнодействующей является геометрическим. Однако равнодействующую силу R можно определить и аналитически, по проекциям на неподвижные оси декартовой системы координат, выбрав за начало координат точку О пересечения линий действия системы сходящихся сил. Равновесие системы сходящихся сил. Условия равновесия системы сходящихся сил Если система сходящихся сил находится в равновесии, механическим условием равновесия является равенство нулю равнодействующей силы. Получим или R = 0 Так как векторная сумма сил равна нулю, то многоугольник сил является замкнутым (начало первого вектора силы и конец последнего совпадают). Таким образом, при равновесии системы сходящихся сил многоугольник сил является замкнутым (условие равновесия в геометрической или графической форме). В аналитической форме условия равновесия системы сходящихся сил заключаются в следующем. Если пространственная система сходящихся сил находится в равновесии, то алгебраическая сумма проекций этих сил на каждую из трех координатных осей должна равняться нулю (на две оси, если система сходящихся сил расположена на плоскости). Поскольку в случае равновесия указанной системы сил их равнодействующая равна нулю ( R = 0), то равны нулю и ее проекции на оси координат, т. е. Rх = 0, Rу = 0, Rг = 0. На основании (1.10) получим
Для плоской сходящейся системы сил имеем
Условия (1.13) и (1.14) в аналитической форме называются также уравнениями равновесия. Для статической определенности задачи число неизвестных не должно превышать числа уравнений равновесия.
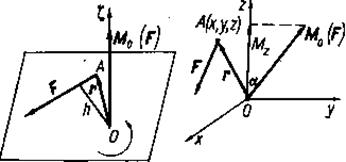
Момент силы относительно точки и оси. Главный вектор и главный момент. Пара сил. Момент силы относительно точки Моментом силы относительно точки называется векторное произведение радиус-вектора точки приложения силы на силу. Итак, по определению (рис. 12),
Обозначая длину перпендикуляра, опущенного из центра момента на линию действия силы, через h (величину h в дальнейшем будем называть плечом), можно модуль вектора Мо (F) представить в виде произведения Fh, т. е. | М0(F) | =М0( F ) = Fh. Таким образом, момент силы относительно точки — это вектор, направленный перпендикулярно к плоскости, содержащей силу и точку, в ту часть пространства,.
Для аналитического определения момента силы относительно точки выберем произвольную систему координат Оxyz с началом в точке О (рис. 13) и обозначим проекции радиуса-вектора г и силы F на координатные оси Оx, ОY, Оz, соответственно через х, у, z и X, У, Z. Заметим, что проекции х, у, z радиуса-вектора г точки приложения силы одновременно означают координаты этой точки. Тогда, спроектировав обе части векторного равенства (1.15) на оси координат, получим выражение момента силы относительно точки в аналитической форме в виде трех его проекций на координатные оси:
Теорема о моменте равнодействующей системы сходящихся сил (теорема Вариньона) Момент силы относительно оси Моментом силы относительно оси называется проекция на ату ось момента силы относительно произвольной точки на оси. Момент силы F относительно оси Оz обозначается через Мz (F). Таким образом, М Момент силы относительно оси, как будет показано в динамике, является физической величиной, характеризующей вращательное движение твердого тела. Согласно определению, моменты силы относительно координатных осей выражаются величинами (1.18), т. е. соответственно равны проекциям М Укажем практический способ определения момента силы относительно оси.
Пара сил Парой сил называется система двух параллельных сил, равных по величине, направленных в противоположные стороны и приложенных к твердому телу. Пара сил может быть ориентирована положительно (против часовой стрелки в правой системе координат) и отрицательно (по часовой стрелке в левой системе координат). Очевидно, что с переходом от правой системы координат к левой ориентация пары сил изменяется на противоположную. Кратчайшее расстояние Н между линиями действия сил пары называется ее плечом. Главный вектор пары сил равен нулю. Пусть силы F и — F пары приложены соответственно в точках А и В. Определим главный момент пары сил относительно какой-либо точки О. Главный момент пары сил не зависит от выбора центра моментов; он обозначается М и называется моментом пары сил: 1 М0 = М = В А х F. Итак, момент пары сил — это свободный вектор, по модулю равный М = Fh и направленный перпендикулярно плоскости ее действия так, чтобы с вершины этого вектора пара сил была ориентирована положительно.
Приложенных к твердому телу
Условия равновесия произвольной системы сил в пространстве. Необходимыми и достаточными условиями равновесия произвольной пространственной системы сил, приложенных к твердому телу, являются обращение в нуль ее главного вектора и главного момента относительно какой-либо точки пространства R = 0, М0 = 0, Где R= Уравнения (1.36) выражают механические условия равновесия произвольной пространственной системы сил (свободного твердого тела). Следовательно, для равновесия параллельных сил, расположенных в одной плоскости, необходимо и достаточно, чтобы алгебраическая сумма проекций сил на параллельную им ось и алгебраическая сумма моментов этих сил относительно произвольной точки равнялись нулю. Условия (1.40) называются также уравнениями равновесия. Для статической определенности задачи число неизвестных сил не должно превышать двух. Условиям равновесия (1.40) можно придать другую форму. Можно составить уравнения моментов сил относительно двух точек А и В:
РАЗЛИЧНЫЕ СЛУЧАИ ПРЕОБРАЗОВАНИЯ СИСТЕМЫ СИЛ Или M0( R )=M0 Поэтому получим: M0(R)=M0 По определению главного момента системы сил окончательно получим М0(R)= что и требовалось доказать. Из (1.42) следует, что момент равнодействующей относительно оси равен алгебраической сумме моментов составляющих сил относительно той же оси. Например, Мz (R) = Центр параллельных сил Или
Rxc= Откуда Xc= Аналогично найдем Yc= Для определения координаты 2с центра параллельных сил повернем сначала все силы на один и тот же угол а, например на угол а = Rzc= Откуда Zc= Следовательно, координаты центра параллельных сил определяются по формулам
Xc=
Понятие о центре тяжести тела Согласно закону всемирного тяготения, на все частицы тела, которое находится вблизи земной поверхности, действуют силы притяжения к Земле, называемые силами тяжести. В связи с небольшими размерами тела по сравнению с радиусом Земли силы тяжести отдельных частиц тела с достаточно большой точностью можно считать между собой параллельными. Силой тяжести, или весом, называется равнодействующая параллельных сил тяжести отдельных частиц тела. Силу тяжести будем обозначать буквой Р.
Где р — вес тела. Как известно из математического анализа, пределы сумм, стоящие в числителе формул (1.52), не зависят от выбора точек Аi (Xi, Yi, Zi) приложения сил Δ Pi; и представляют собой интегралы вида
КИНЕМАТИКА ТОЧКИ Предмет кинематики
Кинематикой (от греческого «кинема» — движение) называется раздел теоретической механики, в котором изучается механическое движение точки, системы материальных точек и абсолютно твердого тела независимо от действующих на них сил. Ньютон исходил из правильных материалистических позиций, признавая объективный характер пространства и времени. Вводя понятия абсолютного пространства и времени, но отрывая их от движущейся материи, Ньютон становился метафизиком. Как было отмечено в введении, диалектический материализм рассматривает пространство и время как объективные формы существования материи. Пространство и время без материи, как и материя вне пространства и времени, не существуют. Пространство и время неразрывно связаны между собой, их единство проявляется в движении. «В мире нет ничего, кроме движущейся материи, и движущаяся материя не может двигаться иначе, как в пространстве и во времени». В теоретической механике пространство, в котором рассматривается движение тел, трактуется как трехмерное эвклидово пространство. В отличие от теоретической механики, теория относительности (релятивистская механика) опирается на иные представления о пространстве и времени. Этому содействовало появление новой геометрии — геометрии Н. И. Лобачевского (1792—1856). В противоположность Ньютону, Н. И. Лобачевский не отрывал пространство и время от движения, рассматривая последнее как изменение положения одних тел по отношению к другим. В своем произведении «Новые начала геометрии» он писал: «В природе мы познаем собственно только движение, без которого чувственные представления невозможны. Следовательно, все другие понятия, например геометрические, образованы нашим разумом искусственно, будучи взятыми в свойствах движения, а поэтому пространство само по себе, отдельно, для нас не существует»2. Из высказываний Н. И. Лобачевского видно, что он рассматривал свойства пространства как проявление взаимосвязей между движущимися телами. За 80 лет до появления теории относительности Н. И. Лобачевский показал, что эвклидова геометрия относится к абстрактным геометрическим системам, в то время как в физическом мире пространственные соотношения определяются физической геометрией, отличной от эвклидовой, в которой свойства пространства и времени органически объединены со свойствами материи, движущейся в пространстве и времени. Следует отметить, что передовые русские ученые в области механики стихийно или сознательно стояли на правильных материалистических позициях в трактовке всех основных понятий теоретической механики, в том числе пространства и времени. Заметим, что эти взгляды на пространство и время в теории относительности соответствуют представлениям о пространстве и времени классиков марксизма, сформулированных ими задолго до появления работ по теории относительности. В теоретической механике при измерении пространства за основную единицу длины принимают метр (м), а за основную единицу времени — секунду (с). Время предполагается одинаковым в любых системах отсчета (системах координат) и не зависимым от движения этих систем относительно друг друга. Время обозначается буквой и рассматривается как непрерывно изменяющаяся величина, принимаемая в качестве аргумента. При измерении времени в кинематике различают такие понятия, как промежуток времени, момент времени, начальный момент времени. Промежутком времени называется время, протекающее между двумя физическими явлениями. Моментом времени называют границу между двумя смежными промежутками времени. Начальным моментом называется время, с которого начинают отсчет времени. Функцию г (t) полагают однозначной, так как рассматриваемая точка М в данный момент времени может находиться только в одном месте пространства Кроме этого г (t) должна быть непрерывной функцией. В большинстве задач механики функция г (t) является Дважды дифференцируемой функцией времени t. Уравнение (11.1) называется кинематическим уравнением движения точки в векторной форме. Это уравнение выражает также закон движения точки, и в векторной форме выражает уравнение траектории точки. При движении точки конец вектора г движется по траектории. Геометрическое место концов переменного вектора при фиксированной точке их приложения называется годографом («годос» по-гречески — путь, «граф» — описывать). Следовательно, траектория точки является годографом радиуса-вектора г. 2. Координатный способ. Этот способ определения движения точки состоит в том, что задаются координаты точки как функции времени, т. е. х=х(t), у = у(t), z = z(t) Между векторным и координатным способами задания движения точки существует следующая связь: r=ix+jy+kz где i, j, k — орты (или единичные векторы), соответственно направленные по осям координат Ох, Оу, Оz. На том же основании, что и г (t), функции х(t), у(t), z(t) являются однозначными, непрерывными, допускающими непрерывные производные. Уравнения (П.2) являются уравнением траектории в параметрической форме. Исключая из уравнений (П.2) параметр t, получаем уравнение траектории в явной форме. Если движение точки задано в полярных координатах г=г(t), φ = φ (t), где г — полярный радиус, φ — угол между полярной осью и полярным радиусом, то уравнения (П.4) выражают уравнение траектории точки. Исключив параметр t, получим г = г(φ ). 3. Естественный способ. Если траектория точки известна заранее, то для определения закона движения точки в пространстве достаточно задать положение точки на ее траектории. С этой целью одну из точек О на траектории принимают за начало отсчета дуговых координат, так как положение движущейся точки М определяется ее ориентированным расстоянием, которое отсчитывается по дуге траектории от выбранной точки отсчета (рис. 36). Следовательно, является функцией времени: s = s(t). Уравнение (11.6) определяет закон движения точки по траектории или закон изменения расстояния. Функция s= s (t) должна быть однозначной, непрерывной и дифференцируемой. За положительное направление отсчета дуговой координаты s принимают направление движения точки в момент, когда она занимает положение О. следует помнить, что уравнение (11.6) не определяет закон движения точки в пространстве, так как для определения положения точки в пространстве нужно знать еще траекторию точки с начальным положением точки на ней и фиксированное положительное направление. Таким образом, движение точки считается заданным естественным способом, если известна траектория и уравнение (или закон) движения точки по траектории. Важно заметить, что дуговая координата точки s отлична от пройденного точкой по траектории пути σ. При своем движении точка проходит некоторый путь σ, которой является функцией времени t. Однако пройденный путь σ совпадает с расстоянием s лишь тогда, когда функция s = s(t) монотонно изменяется со временем, т.е. при движении точки в одном направлении. Допустим, что точка М переходит из М Если движение точки задано координатным способом, то пройденный путь определяется по формуле σ = так как dσ = где dx=xdt, dy= ydt, dz=zdt. Следовательно, dσ = | ds| =
Скорость движения точки Важной характеристикой движения точки является ее скорость. Понятие скорости точки в равномерном прямолинейном движении относится к числу элементарных понятий. Движение точки называется равномерным, если приращения радиуса-вектора точки за одинаковые промежутки времени равны между собой. Если при этом траекторией точки является прямая, то движение точки называется прямолинейным. Для равномерно-прямолинейного движения Δ r = υ Δ t, где v – постоянный вектор. Вектор v называется скоростью прямолинейного и равномерного движения полностью его определяет. Из соотношения (11.10) видно, что скорость прямолинейного и равномерного движения является физической величиной, определяющей перемещение точки за единицу времени. Из (11.10) имеем υ = Направление вектора v указано на рис. 37. Перейдем к рассмотрению неравномерного криволинейного движения точки. Пусть точка М произвольно движется по некоторой кривой. Пусть в момент t точка занимает положение М, а через весьма малый промежуток времени Δ t она занимает положение М1. Положение точки М определяется радиусом-вектором г, а положение точки М1 — радиусом-вектором г+Δ г, равномерное прямолинейное движение точки из М в М^ можно охарактеризовать скоростью, равной отношению Δ г к Δ t, называемой средней скоростью: υ CP= Вектор υ CP совпадает с направлением вектора Δ г. Или υ =r Здесь и далее производные по времени обозначаются по Ньютону, например, г и т. д. Следовательно, скорость в данной точке равна первой производной по времени от радиуса-вектора точки. Так как секущая в пределе переходит в касательную, то скорость в данной точке направлена по касательной к траектории в сторону возрастания дуг. Откуда υ X=x, υ Y=y, υ Z=z Или υ где υ Ускорение движения точки
Физическая величина, характеризующая быстроту изменения во времени скорости движения точки, называется ускорением. Рассмотрим два сколь угодно близких положения точки М и М wСр= Вектор wСр имеет направление Δ υ (рис, 42). Переходя в (11.27) к пределу при Δ t w= w= Или w=
так как υ =r. Таким образом, w=υ =r Из (11.28) видно, что ускорение точки равно нулю лишь тогда, когда скорость точки υ постоянна как по величине, так и по направлению: это соответствует только прямолинейному и равномерному движению. В СИ за единицу ускорения принимают 1 м/с2. Так как ускорение в данной точке равно первой производной по времени от скорости, то оно направлено по касательной к годографу скорости. Проводя в каждой точке траектории векторы, соответственно равные w1, w2, ..., w
Или iω X+i ω Y+k ω Z= ix+jy+kz, Откуда ω х = υ X = x ω у = υ у = у, ω Z=υ Z= z. Проекции ускорения на неподвижные оси координат равны первым производным по времени от соответствующих проекций скорости на те же оси или вторым производным по времени от соответствующих координат движущейся точки. Модуль ускорения ω = Таким образом, получим ω r=r – rφ 2, ω φ =2rφ + rφ. Модуль ускорения
ω = Обозначая через θ угол, образованный ускорением с положительным радиальным направлением, определим направление ускорения ω точки по формуле
tgθ =
Интегрируя, найдем s= υ 0t+ Постоянную интегрирования С2 определим из начальных условий движения: при t = 0, s = s0. Следовательно, С2 = s0. Поэтому s= s0+ υ 0t+ 6. Прямолинейные гармонические колебания точки. Пусть точка движется по прямой, например по оси Ох, и ее расстояние х от начала координат изменяется по закону x=a sin kt где а и k — постоянные. Движение точки является колебательным между положениями точки М1 (а) и М2 (- а). Колебания, определяемые законом (11.48), называются прямолинейными гармоническими колебаниями. Они часто встречаются в технике. В формуле (11.48), а называется амплитудой колебаний, представляющей собой наибольшее отклонение точки от центра колебаний О. Промежуток времени Т = Общие замечания К простейшим движениям твердого тела относятся поступательное движение и вращательное движение вокруг неподвижной оси. В кинематике твердого тела при различных видах его движений интересуются кинематическими характеристиками как движения твердого тела в целом, так и кинематическими характеристиками движения отдельных его точек. Где ω М=υ М, ω А = υ А
Теорема доказана. Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 1614; Нарушение авторского права страницы









 ,
,  .
. 
 МУ(F) = zХ -хZ; М
МУ(F) = zХ -хZ; М 
 , M0=
, M0=  .
. 

 ,
,  .
. 


 (рис. 29), и составим уравнение моментов сил относительно оси х. Получим
(рис. 29), и составим уравнение моментов сил относительно оси х. Получим 

 , Yc=
, Yc=  , Zc=
, Zc= 
 ,
,  ,
, 
 в М
в М  . Положению точки в М
. Положению точки в М  . Пройденной точкой путь σ будет положительной величиной: σ =
. Пройденной точкой путь σ будет положительной величиной: σ = 




 .
.

 = s,
= s, 
 0, найдем ускорение w в данный момент времени
0, найдем ускорение w в данный момент времени 

 , определим направление ускорения в каждой точке (рис. 43). Конечно, приведенный способ определения направления ускорения точки представляет только теоретический интерес. На практике ускорение определяют более удобными методами, о которых будет идти речь в следующих параграфах.
, определим направление ускорения в каждой точке (рис. 43). Конечно, приведенный способ определения направления ускорения точки представляет только теоретический интерес. На практике ускорение определяют более удобными методами, о которых будет идти речь в следующих параграфах.  =
= 
 =
= 
 .
.

 течение которого точка совершает полное колебание, называется периодом колебаний; величина k называется круговой частотой колебаний (теория колебаний изложена в динамике), kt называется фазой колебаний.
течение которого точка совершает полное колебание, называется периодом колебаний; величина k называется круговой частотой колебаний (теория колебаний изложена в динамике), kt называется фазой колебаний.