|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Дифференциальные уравнения плоско-параллельного движения твердого тела
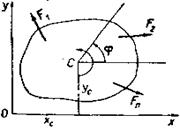
Как известно из кинематики (ч.II., гл. V, § 3), плоско-параллельное движение твердого тела определяется тремя независимыми параметрами: координатами хc и уc полюса (который выберем в центре инерции С тела) и углом поворота φ тела вокруг центра инерции (рис. 118). Следовательно, в данном случае тело имеет три степени свободы (k = 3). Поэтому составим три уравнения Лагранжа второго рода
Будем рассматривать координаты хc, уc и угол поворота φ, как обобщенные координаты: q1=xc, q2=yc, q3= φ Пусть к телу приложена система сил F1, F2, …, Fn указанная на рис. 118. Вычислим обобщенные силы
где Rx, Ry — проекции главного вектора приложенных к телу внешних сил F iна координатные оси Ох и Оу, а Мc — главный момент этих сил относительно оси Сz, перпендикулярной к плоскости движения. Обобщенные силы соответственно равны
Кинетическая энергия тела согласно формуле (111.121) равна
где m — масса тела, Ic-его момент инерции относительно центральной оси Сz. Вычисляя частные производные нения Лагранжа второго рода, получим искомые дифференциальные уравнения плоско-параллельного движения твердого тела
или в векторной форме m r c= R, I c ε = M c, где ε =φ — угловое ускорение тела, гc = ω c — ускорение центра масс тела, Мc — главный момент относительно точки С.
П р и м е р. Колесо радиуса г и веса Р катится без скольжения по горизонтальной плоскости под действием силы F, приложенной в центре инерции колеса (рис. 119). Задан закон движения центра инерции колеса хc = Найти величину силы F, нормальную реакцию опоры N и коэффициент трения k колеса о плоскость. Произведем анализ сил, действующих на колесо. На него действует сила F, сила тяжести Р и реакция горизонтальной плоскости, состоящая из нормальной реакции N и силы трения Fтр, которая направлена в сторону, противоположную движению колеса. Применив уравнения (111.226), получим
Так как xc=1, yc=0, Fтр=kN, Mc=-Fтрr=-kNr, то
Мгновенный центр скоростей тела находится в точке касания колеса с плоскостью движения. Поэтому
Таким образом,
§ 5. Дифференциальные уравнения вращательного движения твердого тела вокруг неподвижной точки (динамические уравнения Эйлера)
Для вывода дифференциальных уравнений вращательного движения твердого тела вокруг неподвижной точки воспользуемся уравнениями Лагранжа второго рода
и совместим подвижные координатные оси Oξ, Oη, Oζ неизменно связанные с телом, с его главными осями инерции относительно неподвижной точки О. Из кинематики известно (ч. II, гл. VI, § 2), что положение твердого тела с неподвижной точкой определяется тремя углами Эйлера, которые примем за обобщенные координаты q1=ψ, q2= θ, q3=φ. Тело в рассматриваемом случае имеет три степени свободы (k = 3). В соответствии с формулами (111.118), кинетическая энергия тела равна
где А =Iξ , В =Iη , С=Iζ - главные моменты инерции тела относительно подвижных осей, р=ω ξ , q=ω η , r=ω ζ -проекции угловой скорости вращения тела на подвижные оси, определяемые из кинематических уравнений Эйлера
Вычислим частные производные
так что
Аналогично получим:
В соответствии с теоремой Эйлера о перемещении тела с неподвижной точкой (ч. II, гл. VI, § 1)
следовательно, обобщенные силы соответственно будут Q1=Mz, Q2=MON, Q3=Mζ , где Mz, MON, Mζ — главные моменты приложенных к телу внешних сил относительно неподвижной оси Оz, линии узлов ОN и подвижной оси Oζ . Таким образом, уравнения Лагранжа второго рода в рассматриваемом случае будут S1=Mz, S2=MN, S3=Mζ . Из трех полученных дифференциальных уравнений первые два очень громоздкие, в то время как третье уравнение
имеет чрезвычайно простую, симметричную форму и оно явно не содержит компоненты угловой скорости тела p, q, r. Очевидно, сложность записи первых двух уравнений объясняется тем, что в правых частях этих уравнений вместо моментов Мξ , Мη фигурируют отличные от них обобщенные силы Мz и МN. Однако путем надлежащего преобразования г эти уравнения можно привести к форме, аналогичной третьему уравнению. Итак, дифференциальные уравнения вращательного движения твердого тела вокруг неподвижной точки принимают вид
Эти уравнения называются динамическими уравнениями Эйлера. Заметим, что уравнения Эйлера можно также вывести, применив теорему об изменении кинетического момента.
Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 1196; Нарушение авторского права страницы
 (j=1, 2, 3).
(j=1, 2, 3).

 и
и  и подставляя в урав-
и подставляя в урав-



 , уc = г.
, уc = г.




 N=P,
N=P, 





 N=P,
N=P,