|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема: «Расчет электромеханической системы типа ТПЧ-АД»Стр 1 из 5Следующая ⇒
Курсовой проект
По дисциплине «электромеханические системы »
Тема: «Расчет электромеханической системы типа ТПЧ-АД»
Вариант № 00
Выполнил: группа БА 99-1ш
Подпись__________
Проверил: Панченко В.С.
Подпись___________
г. Чайковский 2003 г
ВВЕДЕНИЕ
В данном курсовом проекте осуществляется детальный расчет регулирования электропривода системы ТПЧ - АД. Расчет производится на основе предварительно выбранного двигателя по нагрузочной диаграмме рабочей машины, после проверок на перегрузочную способность и по нагреву с учетом переходных процессов принимается решение о целесообразности двигателя в данной системе. Затем осуществляется расчет энергетики и системы ТПЧ - АД и на основе сравнения технологических показателей проектируемого электропривода. С предъявленными к нему требованиями делается окончательный вывод о внедрении его для привода данной рабочей машины, при данных условиях его работы. Правильный выбор статических и динамических характеристик определяют не только производительность рабочего механизма, но и качество выпускаемой продукции. Для решения этих задач необходимы всесторонние знания теории и практики, которые приобретаются при изучении курса “Теория электромеханических систем”, при проектировании этих систем, а также при эксплуатации электроприводов различных механизмов на промышленных предприятиях. Задачами выполнения курсового проекта является овладение определенных навыков анализа данных о режимах нагрузки, построения нагрузочных диаграмм механизма и электропривода, научиться правильно выбирать электрические машины и преобразовательные устройства с учетом требований технологического процесса и современных тенденций развития автоматизированного электропривода, обосновывать целесообразность применения разомкнутой или замкнутой системы исходя из заданных условий, рассчитывать параметры и выбирать элементы принятой системы, оценивать энергетические показатели спроектированной системы электропривода. Предполагается также, что выполнение данного курсового проекта будет способствовать закреплению и углублению знаний по теории электромеханических систем и специальности в целом, развитию творческой инженерной инициативы, приобретению или закреплению навыков использования средств вычислительной техники, справочной, учебной или специальной литературы, навыков выполнения графической работы и оформления технической документации.
ЗАДАНИЯ НА КУРСОВОЙ ПРОЕКТ
Исходные данные для проектирования представлены в таблице 1 и 2, В таблице 1 приведена Тахограмма, по которой работает механизм и которая составляет повторяющийся цикл работы. Здесь ω 1м, ω 2м, ω 3м В таблице 1
приведены варианты механических характеристик рабочих машин, причем закон изменения момента сопротивления (нагрузки) механизма задан в виде уравнения. Здесь же указаны значения момента инерции механизма в долях от момента инерции двигателя, тип двигателя и способ его питания, характер момента сопротивления механизма. таблица 2
Тип двигателя - асинхронный с короткозамкнутым ротором. Способ питания - от тиристорного преобразователя частоты (ТПЧ). Стандартная продолжительность включения ПВ%станд=40%. Режим работы - повторно-кратковременный.
ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ Спроектированная система электропривода должна обеспечить выполнение следующих требований: 1. Необходимый диапазон регулирования скорости вращения рабочей машины (см. заданную тахограмму). 2. Плавный пуск, торможение и реверс рабочей машины. 3. Заданное быстродействие (см. далее заданное суммарное время переходных процессов за цикл работы). 4. Минимум потерь энергии в переходных процессах. 5. Возможность изменения направления вращения механизма. 6. Режим рекуперативного торможения. 7. Требуемую перегрузочную способность двигателя. 8. Средняя температура нагрева изоляции двигателя не должна превышать допустимую. 9. Статическая ошибка по скорости не должна превышать заданную
Аннотация Автоматизированный привод в настоящее время получил широкое применение во всех сферах жизни и деятельности общества, от сфер промышленного производства до сфер быта. Широта применения определяет большой диапазон мощностей электроприводов (от долей ватта до десятков тысяч киловатт) и значительное разнообразие их исполнение. Наряду с регулируемыми электроприводами широко применяются простейшие нерегулируемые электроприводы переменного тока с асинхронными и синхронными двигателями, получающими питание непосредственно от сети переменного тока. Что касается используемых двигателей, то наиболее простым, дешевым и надежным электродвигателем является асинхронный двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Ведь возможности регулирования аналогичны возможностям изменения напряжения на якоре ДПТ с НВ, в асинхронном электроприводе обеспечиваются путем простого изменения частоты напряжения тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты. Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, т. к. как правило требуются дополнительные ступени преобразования энергии, а наименьшим числом ступеней обладают вентильные преобразователи частоты. Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования.
РАСЧЕТ КУРСОВОГО ПРОЕКТА 1. Построим тахограмму рабочей машины
Определим ПВрасч.% - расчетную продолжительность включения. ПВ%р = где n, tpi, tц - число установившихся режимов работы, их длительность и время цикла.
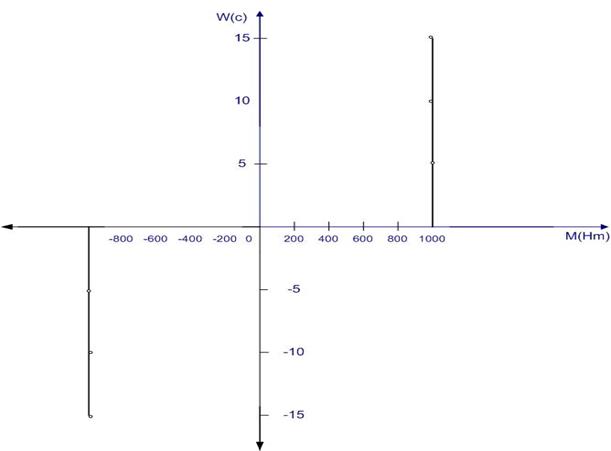
2. Построим механическую характеристику рабочей машины Мсм( Мсм0 = 1000(Н× м) Мсм1 = 1000(Н× м) Мсм2 = 1000(Н× м) Мсм3 = 1000(Н× м)
Механическая характеристика рабочей машины.
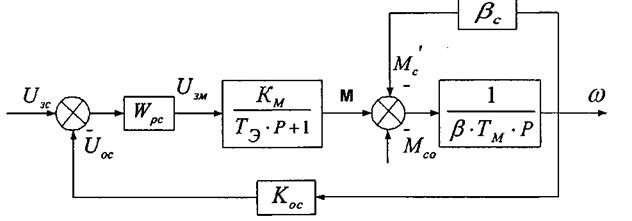
И ее структурная схема.
Примем систему с подчиненным регулированием координат, поскольку на практике чаще всего используется стандартная настройка на технический оптимум (соотношение постоянных времени контуров регулирования а=2), то контур скорости также настроим на технический оптимум. При частотном управлении АД м.б. использована система частотного регулирования момента с автономным инвертором напряжения (АЙН), дополненная отрицательной обратной связью по скорости.
W(P)PC = КРС/(ТФР +1) - передаточная функция пропорционального регулятора скорости, причем в ней учтена малая постоянная времени Тф фильтра в цепи обратной связи по скорости. ФП - функциональный преобразователь; РМ - регулятор момента; PC - регулятор скорости.
ЗАКЛЮЧЕНИЕ
ЭП представляет собой динамическую систему, состояние которой в каждый момент времени определяется текущими значениями ее переменных и приложенных к системе внешних воздействий, В разомкнутой электромеханической системе имеются механические (силы, моменты) и электрические (токи, потокосцепления) переменные. Кроме того, в связи с нагревом двигателя, к переменным следует отнести температуры частей двигателя. Внешними воздействиями в электромеханической системе являются приложенные к обмоткам напряжения, а также внешние силы и моменты. В связи с наличием элементов, обладающим механической электромагнитной и тепловой инерциями, при изменении внешних воздействий переход, системы от одного состояния к Другому протекает во времени, поэтому позволяет оценить характеристики динамитам режимов ЭП (время, расход энергии, пиковые нагрузи) расчет самого переходного процесса и его времени. Обычно для проектирования ЭП требуется обеспечить изменение скорости от ω НАЧ до ω кон за минимально время при моменте, который бы не превышал допустимого. Если скорость механизма зависит от нагрузки, то ускорение ЭП не является постоянным. При реактивном моменте сопротивления, скорость при реверсе должна изменятся в процессах торможения и разгона с различными ускорениями, Ускорение можно изменять (до определенных пределов) и добиваться нужного времени протекания переходных процессов.
ЛИТЕРАТУРА 1. Столбов Б М, Мазунин Н Т. Задание на курсовой проект и методические указания по его выполнению для студентов специальности « Автоматизация технологических процессов и производств»- г. Пермь 1999г. 2. Ключев В И. Теория электропривода. Учебник для вузов. 1985г. 3. Чиликин М Г. Сандлер А С. Общий курс электропривода. 1 Курсовой проект
По дисциплине «электромеханические системы »
Тема: «Расчет электромеханической системы типа ТПЧ-АД»
Вариант № 00
Выполнил: группа БА 99-1ш
Подпись__________
Проверил: Панченко В.С.
Подпись___________
г. Чайковский 2003 г
ВВЕДЕНИЕ
В данном курсовом проекте осуществляется детальный расчет регулирования электропривода системы ТПЧ - АД. Расчет производится на основе предварительно выбранного двигателя по нагрузочной диаграмме рабочей машины, после проверок на перегрузочную способность и по нагреву с учетом переходных процессов принимается решение о целесообразности двигателя в данной системе. Затем осуществляется расчет энергетики и системы ТПЧ - АД и на основе сравнения технологических показателей проектируемого электропривода. С предъявленными к нему требованиями делается окончательный вывод о внедрении его для привода данной рабочей машины, при данных условиях его работы. Правильный выбор статических и динамических характеристик определяют не только производительность рабочего механизма, но и качество выпускаемой продукции. Для решения этих задач необходимы всесторонние знания теории и практики, которые приобретаются при изучении курса “Теория электромеханических систем”, при проектировании этих систем, а также при эксплуатации электроприводов различных механизмов на промышленных предприятиях. Задачами выполнения курсового проекта является овладение определенных навыков анализа данных о режимах нагрузки, построения нагрузочных диаграмм механизма и электропривода, научиться правильно выбирать электрические машины и преобразовательные устройства с учетом требований технологического процесса и современных тенденций развития автоматизированного электропривода, обосновывать целесообразность применения разомкнутой или замкнутой системы исходя из заданных условий, рассчитывать параметры и выбирать элементы принятой системы, оценивать энергетические показатели спроектированной системы электропривода. Предполагается также, что выполнение данного курсового проекта будет способствовать закреплению и углублению знаний по теории электромеханических систем и специальности в целом, развитию творческой инженерной инициативы, приобретению или закреплению навыков использования средств вычислительной техники, справочной, учебной или специальной литературы, навыков выполнения графической работы и оформления технической документации.
ЗАДАНИЯ НА КУРСОВОЙ ПРОЕКТ
Исходные данные для проектирования представлены в таблице 1 и 2, В таблице 1 приведена Тахограмма, по которой работает механизм и которая составляет повторяющийся цикл работы. Здесь ω 1м, ω 2м, ω 3м В таблице 1
приведены варианты механических характеристик рабочих машин, причем закон изменения момента сопротивления (нагрузки) механизма задан в виде уравнения. Здесь же указаны значения момента инерции механизма в долях от момента инерции двигателя, тип двигателя и способ его питания, характер момента сопротивления механизма. таблица 2
Тип двигателя - асинхронный с короткозамкнутым ротором. Способ питания - от тиристорного преобразователя частоты (ТПЧ). Стандартная продолжительность включения ПВ%станд=40%. Режим работы - повторно-кратковременный.
ТРЕБОВАНИЯ К ЭЛЕКТРОПРИВОДУ Спроектированная система электропривода должна обеспечить выполнение следующих требований: 1. Необходимый диапазон регулирования скорости вращения рабочей машины (см. заданную тахограмму). 2. Плавный пуск, торможение и реверс рабочей машины. 3. Заданное быстродействие (см. далее заданное суммарное время переходных процессов за цикл работы). 4. Минимум потерь энергии в переходных процессах. 5. Возможность изменения направления вращения механизма. 6. Режим рекуперативного торможения. 7. Требуемую перегрузочную способность двигателя. 8. Средняя температура нагрева изоляции двигателя не должна превышать допустимую. 9. Статическая ошибка по скорости не должна превышать заданную
Аннотация Автоматизированный привод в настоящее время получил широкое применение во всех сферах жизни и деятельности общества, от сфер промышленного производства до сфер быта. Широта применения определяет большой диапазон мощностей электроприводов (от долей ватта до десятков тысяч киловатт) и значительное разнообразие их исполнение. Наряду с регулируемыми электроприводами широко применяются простейшие нерегулируемые электроприводы переменного тока с асинхронными и синхронными двигателями, получающими питание непосредственно от сети переменного тока. Что касается используемых двигателей, то наиболее простым, дешевым и надежным электродвигателем является асинхронный двигатель, поэтому его использование в регулируемом электроприводе представляет особый интерес. Ведь возможности регулирования аналогичны возможностям изменения напряжения на якоре ДПТ с НВ, в асинхронном электроприводе обеспечиваются путем простого изменения частоты напряжения тока статорной обмотки. Для реализации этих возможностей необходимо осуществлять питание статорной обмотки двигателя от управляемого преобразователя частоты. Регулирование частоты представляет собой технически более сложную задачу, чем регулирование выпрямленного напряжения, т. к. как правило требуются дополнительные ступени преобразования энергии, а наименьшим числом ступеней обладают вентильные преобразователи частоты. Они содержат ступень преобразования переменного тока в постоянный и ступень инвертирования.
РАСЧЕТ КУРСОВОГО ПРОЕКТА 1. Построим тахограмму рабочей машины
Определим ПВрасч.% - расчетную продолжительность включения. ПВ%р = где n, tpi, tц - число установившихся режимов работы, их длительность и время цикла.
2. Построим механическую характеристику рабочей машины Мсм( Мсм0 = 1000(Н× м) Мсм1 = 1000(Н× м) Мсм2 = 1000(Н× м) Мсм3 = 1000(Н× м)
Механическая характеристика рабочей машины.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1137; Нарушение авторского права страницы
 - скорости работы механизма в установившихся режимах t1, t2, t3 - время работы механизма с установившейся скоростью (сюда не входит время переходных процессов пуска, торможения, изменения скорости); to - время паузы. Точность поддержания установившейся скорости δ 3 задана в процентах от скорости идеального холостого хода двигателя на регулировочной характеристике.
- скорости работы механизма в установившихся режимах t1, t2, t3 - время работы механизма с установившейся скоростью (сюда не входит время переходных процессов пуска, торможения, изменения скорости); to - время паузы. Точность поддержания установившейся скорости δ 3 задана в процентах от скорости идеального холостого хода двигателя на регулировочной характеристике. мi=f(t) за цикл работы по данным табл.1
мi=f(t) за цикл работы по данным табл.1 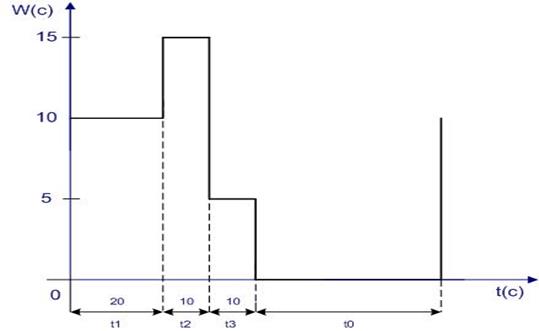
 %,
%,