
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
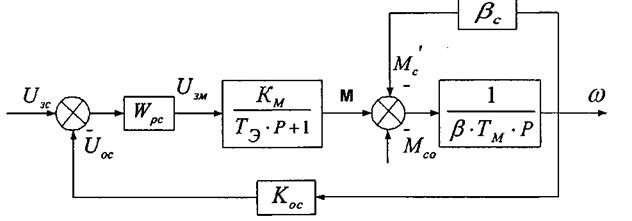
Уравнение в дифференциальной и операторной формах и структурная схема разомкнутой системы электропривода, с численными значениями параметров.
Структурная схема электропривода с асинхронным двигателем должна быть построена для области рабочих скольжений также на основании уравнения динамической механической характеристики, записанного в операторной форме.
Уравнение механической характеристики: (1 + Tэ • р) • М - β c • (ω 0 - ω )
Уравнение движения электропривода; М-Мс= β -Тм · р · ω
Кп · Uу = ( 1 – Tм · p ) · ω При составления структурных схем воспользуемся уравнениями обобщенной линеаризованной системы УП-Д, подставив в них параметры Тэ, Тп, β, соответствующие данной системе электропривода.
Для системы ПЧ - АД: Тп = 0;
Найдем критическое скольжение:
где ω 0эл.н = ω 0н · pн = 78, 5 · 4 = 314 (c-1)
С учетом численных значений коэффициентов линеаризованная система ПЧ-АД будет иметь вид:
14.Вывод в отношении точности поддержания установившейся скорости на различных участках цикла.
Определим точность поддержания скорости привода в установившемся режиме работы (статическая ошибка по скорости) по соотношению;
где ω ор, ω с(Мн), ∆ ω с(Мн)- скорость идеального х.х., статическая скорость и статическое падение скорости вращения при М=Мн на i-ой регулировочной характеристике. Во всех случаях δ > 3%. т.о. можно сделать вывод, что система должна быть замкнутой.
Синтез замкнутой системы электропривода И ее структурная схема.
Примем систему с подчиненным регулированием координат, поскольку на практике чаще всего используется стандартная настройка на технический оптимум (соотношение постоянных времени контуров регулирования а=2), то контур скорости также настроим на технический оптимум. При частотном управлении АД м.б. использована система частотного регулирования момента с автономным инвертором напряжения (АЙН), дополненная отрицательной обратной связью по скорости.
W(P)PC = КРС/(ТФР +1) - передаточная функция пропорционального регулятора скорости, причем в ней учтена малая постоянная времени Тф фильтра в цепи обратной связи по скорости. ФП - функциональный преобразователь; РМ - регулятор момента; PC - регулятор скорости.
Определение передаточных функций регуляторов тока (момента) и скорости. в системе ГПЧ-АД с замкнутым контуром регулирования скорости передаточная функция регулятора скорости:
Wpc (p) =
где Ком коэффициент обратной связи по моменту:
Ком =
Тμ - малая некомпенсированная постоянная; Тц =0, 005ct Тм =0, 12 с - электромеханическая постоянная электропривода; β = 8, 9 - жесткость естественной характеристики двигателя; Кос, Кот - коэффициенты обратной связи по скорости и току.
Wpc (p) =
В этом случае не обходим П-регулятор скорости с коэффициентом Крс.
17.Расчет параметров регуляторов.
Расчет параметров выполним только для регулятора скорости. Напряжение задания скорости Uзс.м соответствующее наибольшей заданной установившейся скорости, примем равным 12В. Напряжения, соответствующие двум другим установившимся скоростям находятся по следующей формуле:
Механические характеристики замкнутой системы для трех напряжений задания скорости. Найдем модуль жесткости статической механической характеристики в замкнутой
Определим точность поддержания скорости на каждом из участков работы ЭП в замкнутой системе;
где ω ор, ω с(Мн), ∆ ω с(МН)-скорость идеального х.х., статическая скорость и статическое падение скорости вращения при М = Мн на i-ой регулировочной характеристике.
т.о. в замкнутой системе точность поддержания скорости возросла, но все же эта система не удовлетворяет заданной точности поддержания установившейся скорости на всех участках цепи, т.е 3%.
Анализ динамических качеств замкнутой системы. Анализ динамических качеств замкнутой системы необходим для проверки соответствия качества динамических процессов заданным. Определим установившуюся динамическую ошибку (при пуске): ∆ ω дз = 4· Tμ · ε 0 = 4·0, 005 · 540 = 10, 8(c-1)
Определим статическую
∆ ω сз = Δ ω ∑ з = 10, 8 + 2, 3 = 13, 1(c-1)
Найдем время 1-го согласования текущего и установившегося значения скорости: t = 4, 7∙ Тμ 1= 4, 7 ∙ 0, 005=0, 0235(с)
Найдем пере регулирование по скорости при пуске вхолостую по соотношению: Δ ω м =0, 043· (ω оз.м – ω нач ) где ω нач = ω оз.м - Δ ω = 0, 043 ∙ (74, 5 – 72, 2) = 0, 1(c-1)
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 758; Нарушение авторского права страницы

 ;
; 
 ; K΄ n = 2π Kуч
; K΄ n = 2π Kуч



 Ком = Мн/12
Ком = Мн/12
















 ошибку по скорости в замкнутой системе:
ошибку по скорости в замкнутой системе: 