
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Момент количеств движения тела в поступательном движении и тела, вращающегося вокруг неподвижной оси.
Тело в поступательном движении можно принять за материальную точку, поэтому для вычисления его момента количеств движения можно использовать формулы для вычисления момента количества движения материальной точки, приведенные в п. 15. Учитывая, что количество движения тела Q = MVC, имеем
где rC - радиус-вектор центра масс тела относительно неподвижного центра O, а M и VC - масса тела и скорость центра масс. У тела, вращающегося вокруг неподвижной оси Oz, скорость любой точки тела, отстоящей от оси вращения на расстоянии hzi, равна Vi= ω hzi, где ω - угловая скорость тела. Следовательно, для этой точки
В выражении (11) согласно правилу знаков для момента вектора относительно оси kzi имеет знак плюс, если вектор скорости поворачивает тело вокруг оси Oz, смотря с ее конца, против хода часов и вращение тела наблюдается против часовой стрелки. В противном случае он имеет знак минус. Для всего тела, вынося общий множитель ω за скобки и учитывая, что выражение в скобках является моментом инерции тела относительно оси Oz, имеем
Момент количеств движения относительно оси вращения имеет знак плюс, когда вращение, наблюдаемое с ее конца, происходит против часовой стрелки. Так как по оси вращения мы всегда можем направить одну координатную ось в ту или иную сторону, то часто в выражениях (11) и (12) знаки не учитывают. Такое же распределение скоростей будет в данный момент времени и в случае движения тела с одной неподвижной точкой при его вращении вокруг мгновенной оси вращения с мгновенной угловой скоростью ω , то есть
где Kω - момент количеств движения тела относительно мгновенной оси вращения, всегда проходящей через неподвижный центр или точку, а Jω - момент инерции тела относительно мгновенной оси вращения. Из-за изменения положения мгновенной оси вращения в твердом теле Jω меняется, в то время как Jz при вращении тела вокруг неподвижной оси остается
16 билет 1 вопрос – аналитические условия Равновесия тела под действием пространственной системы сил
R = 0, L O = 0. Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) пространственной системы сил можно сформулировать следующим образом: Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и сумма их моментов относительно этих осей были равны нулю:
Если на тело кроме сил действуют пары сил, заданные их векторными моментами M k, то при этом вид первых трех уравнений равновесия не изменится (сумма проекций сил пары на любую ось равна нулю), а в последние три уравнения добавляются суммы проекций векторов M k на координатные оси:
С использованием понятия бивектора пространственной системы сил условия равновесия могут быть сформулированы следующим образом: Для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы бивектор этой системы сил был равен нулю: Wc = На этом основании развит матричный метод составления уравнений равновесия пространственной системы сил, ориентированный на применение компьютерных систем математических вычислений. Вышеизложенные условия равновесия произвольной пространственной системы сил выражаются шестью уравнениями. Задачи статики, в которых число скалярных неизвестных (обычно они представляют собой неизвестные реакции связей) равно числу уравнений равновесия, содержащих эти неизвестные, называются статически определимыми. В этом случае и саму конструкцию (одно твердое тело или систему тел) также называют статически определимой. Задачи же (а также рассматриваемые конструкции), для которых число неизвестных больше числа уравнений равновесия, называют статически неопределимыми. Такие задачи не могут быть решены с использованием только уравнений равновесия. Таким образом, чтобы задача статики на равновесие тела под действием произвольной пространственной системы сил являлась статически определимой, число неизвестных должно быть равно шести. Рассмотрим теперь частные случаи пространственных систем сил, для которых условия равновесия выражаются тремя уравнениями.
В этом случае, когда все действующие на тело силы параллельны друг другу, можно для удобства выбрать координатные оси так, чтобы ось Oz была параллельна силам. Тогда для каждой силы ее проекции на оси Ох и Oy и момент относительно оси Oz будут равны нулю и соответствующие три уравнения обратятся в тождества. В результате получаем следующие три уравнения равновесия:
Для равновесия пространственной системы параллельных сил необходимо и достаточно, чтобы сумма проекций всех сил на ось, параллельную силам, и суммы их моментов относительно двух других координатных осей были равны нулю.
В этом случае, когда линии действия всех сил пересекаются в одной точке (в которую можно поместить начало координат О), их главный момент относительно этой точки равен нулю. В результате получаем следующие три уравнения равновесия:
Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы прекций этих сил на координатные оси Ox, Oy и Oz были равны нулю. Задачи статики на равновесие тела под действием пространственной системы параллельных или сходящихся сил будут статически определимыми, если в них содержится только три скалярных неизвестных. 2 вопрос- MOMEНT КОЛИЧЕСТВА ДВИЖЕНИЯ Количеством движения, или импульсом частицы, называется произведение ее массы m на скорость v. Изменение импульса происходит тогда и только тогда, когда на частицу действует сила. Если сила не действует, импульс сохраняется, его величина не зависит от времени. Закон сохранения импульса, как и закон сохранения энергии, - один из основных законов природы. Во всех без исключения случаях, что бы ни происходило с системой тел любой природы, ее энергия и импульс не изменяются, лишь перераспределяясь между частями системы, если она ни с чем не взаимодействует (а это и означает, что на нее не действует сила). В атоме водорода движущийся электрон испытывает силу притяжения ядра. Поскольку ядро в тысячи раз тяжелее электрона, можно принять, что оно неподвижно относительно центра масс системы, и считать, что в любом атоме движутся только электроны. Пока ограничимся атомом водорода. При движении электрона вокруг протона сохраняется его полная энергия Е, равная сумме потенциальной и кинетической энергий. Импульс электрона меняется, так как на него действует сила притяжения. Но в данном конкретном случае есть другая величина, которая остается неизменной. Когда частица массы m вращается со скоростью v по окружности радиуса r, то одной из важнейших характеристик ее движения, наряду с энергией, служит момент количества движения (импульса), или просто момент. Обозначим его буквой М. Буквы М и v напечатаны жирным шрифтом, чтобы подчеркнуть: скорость и момент количества движения - величины векторные. Вектор М направлен по оси вращения, а в какую сторону, зависит от направления вращения. При движении частицы под действием силы, обладающей центральной симметрией (а именно такова сила, притягивающая электрон к ядру), момент не зависит от времени - на всей траектории он один и тот же. Можно сказать иначе. Траектория частицы определяется ее энергий Е и моментом М (его величиной и направлением): траектория (при Е < 0эллипс или окружность ) лежит в плоскости, перпендикулярной вектору момента М. Величина момента М и энергия Е связаны условием 2М2 ЈЅЕЅ/e 2mеЈ1. При равенстве, то есть когда величина момента наибольшая при фиксированной энергии, траекторией будет окружность. Чем момент меньше, тем эллипс более вытянут. Это происходит не за счет удлинения большой оси (ее длина зафиксиро вана значением энергии), а за счет уменьшения малой. Последнему неравенству можно придать несколько странный вид: М2 Ј ћ2(а/а В). Боровский радиус аВ пропорционален ћ2, поэтому в неравенстве фактически постоянной Планка нет. Переписанное в таком виде неравенство показывает, что момент количества движения М и постоянная Планка ћ имеют одинаковые размерности.
Билет 1 вопрос-Равновесие тела под действием плоской системы сил
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) плоской системы сил можно сформулировать в следующих трех формах:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма их алгебраических моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно двух центров А и В и сумма их проекций на ось Ox, не перпендикулярную оси Ox, были равны нулю:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно любых трех центров А, В и С, не лежащих на одной прямой, были равны нулю:
Уравнения равновесия в форме (I) считаются основными, так как при их использовании нет никаких ограничений на выбор координатных осей и центра моментов. С использованием понятия бивектора плоской системы сил условия равновесия в форме (I) могут быть сформулированы следующим образом: Для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы бивектор этой системы сил был равен нулю: Wc = На этом основании развит матричный метод составления уравнений равновесия плоской системы сил, ориентированный на применение компьютерных систем математических вычислений. Во всех вышеизложенных формах условия равновесия плоской системы сил выражаются тремя уравнениями. Задачи статики, в которых число скалярных неизвестных (обычно они представляют собой неизвестные реакции связей) равно числу уравнений равновесия, содержащих эти неизвестные, называются статически определимыми. В этом случае и саму конструкцию (одно твердое тело или систему тел) также называют статически определимой. Задачи же (а также рассматриваемые конструкции), для которых число неизвестных больше числа уравнений равновесия, называют статически неопределимыми. Такие задачи не могут быть решены с использованием только уравнений равновесия. Таким образом, чтобы задача статики на равновесие тела под действием произвольной плоской системы сил являлась статически определимой, число неизвестных должно быть равно трем. Рассмотрим теперь частные случаи плоских систем сил, для которых условия равновесия выражаются двумя уравнениями.
В этом случае, когда все действующие на тело силы параллельны друг другу, можно для удобства направить ось Ox перпендикулярно силам. Тогда проекция каждой из сил на ось Ох будет равна нулю и первое из уравнений (I) обратится в тождество. В результате для плоской системы параллельных сил остаются два уравнения равновесия:
Другая форма уравнений для такой системы сил, вытекающая из общих уравнений (II), имеет вид:
При этом точки А и В не должны лежать на прямой, параллельной силам.
В этом случае, когда линии действия всех сил пересекаются в одной точке, их моменты относительно этой точки равны нулю. В результате получаем следующие уравнения равновесия:
то есть для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы суммы прекций этих сил на координатные оси Ox и Oy были равны нулю. Задачи статики на равновесие тела под действием плоской системы параллельных или сходящихся сил будут статически определимыми, если в них содержится только две скалярных неизвестных. 2 вопрос- импульс силы. Импульс силы — это мера воздействия силы на тело за данный промежуток времени (в поступательном движении). За конечный промежуток времени он равен определенному интегралу от элементарного импульса силы, где пределами интегрирования являются моменты начала и конца промежутка времени действия силы Об ударе.рассматриваются следующие вопросы: 1. Явление удара. 2. Прямой центральный удар двух тел. 3. Удар по вращающемуся телу.
Явление удара. Ударом будем называть кратковременное действие на тело некоторой силы Опыт показывает, что взаимодействие их очень кратковременно (время контакта исчисляется тысячными долями секунды), а сила удара довольно велика (в сотни раз превышает вес этих тел). Да и сама сила – не постоянна по величине. Поэтому явление удара - сложный процесс, сопровождающийся к тому же деформацией тел. Точное исследование его требует знания физики твердого тела, законов тепловых процессов, теории упругости и др. Мы же воспользуемся довольно простыми методами исследования, но которые, как подтверждает практика, достаточно правильно объясняют явление удара. Поскольку сила удара Чтобы сформулировать первые особенности явления удара, рассмотрим сначала действие такой силы на материальную точку. Пусть к материальной точке М, движущейся под действием обычных сил
Рис.111
Из уравнения находим изменение скорости за время удара (рис.111):
Это изменение скорости оказывается конечной величиной. Дальнейшее движение точки начнется со скоростью Теперь можно сделать несколько выводов. 1. При исследовании явления удара обычные силы можно не учитывать. 2. Так как время τ мало, перемещением точки за время удара можно пренебречь. 3. Единственный результат действия удара – только изменение вектора скорости.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 874; Нарушение авторского права страницы




 Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю:
Для равновесия твердого тела, находящегося под действием произвольной пространственной системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно произвольного центра О были равны нулю:  Fix = 0;
Fix = 0;  Для равновесия твердрго тела, находящегося под действием плоской системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы.
Для равновесия твердрго тела, находящегося под действием плоской системы сил, необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы. . Силы, возникающей, например, при встрече двух массивных тел.
. Силы, возникающей, например, при встрече двух массивных тел.  , мало, при описании процесса удара будем пользоваться не дифференциальными уравнениями движения, а теоремой об изменении количества движения. Потому что измеряемой конечной величиной является не сила удара, а импульс ее
, мало, при описании процесса удара будем пользоваться не дифференциальными уравнениями движения, а теоремой об изменении количества движения. Потому что измеряемой конечной величиной является не сила удара, а импульс ее 
 по некоторой траектории (рис.111), в какой-то момент была приложена мгновенная, большая сила
по некоторой траектории (рис.111), в какой-то момент была приложена мгновенная, большая сила  где
где  и
и  - скорости точки в конце и в начале удара;
- скорости точки в конце и в начале удара;  - импульс мгновенной силы
- импульс мгновенной силы 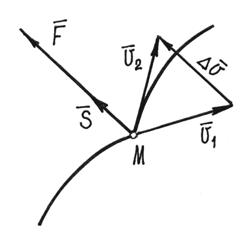
 .
.