
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пункт 5. Синтез скорректированной системы ⇐ ПредыдущаяСтр 3 из 3
Задача синтеза решается в три этапа: 1. Выбор структурно схемы системы управления; 2. Выбор желаемой передаточной функции; 3. Определение параметров корректирующих устройств (КУ);
Структурная схема скорректированной системы приведена на рисунке 5.1:
Рис. 5.1. Схема скорректированной системы управления. Передаточная функция такой системы выглядит следующим образом:
Передаточные функции усилителя, исполнительного устройства и объекта управления соответственно:
Передаточные функции корректирующих устройств:
Выполним подстановку вышеуказанных передаточных функций в
Параметры КУ определяются из равенства передаточной функции скорректированной системы и желаемой передаточной функции:
Выбор желаемой передаточной функции осуществляется на основное коэффициентного подхода с помощью монограмм качества. Запишем выражения желаемых коэффициентов передаточной функции:
Коэффициенты Коэффициент z находится по формуле:
Рис 5.2. Объединенная номограмма качества для
Рис 5.3. Объединенная номограмма качества для
Рис 5.4. Объединенная номограмма качества для
Рис 5.5. Объединенная номограмма качества для
Расчеты коэффициентов корректирующих устройств в соответствии с выбранными номограммами приведены в таблице 5.1. Таблица 5.1 Расчет коэффициентов корректирующих устройств.
Минимальные параметры получились при расчете по второй номограмме. Значит, их значения выберем для расчета передаточной функции скорректированной системы. Она будет иметь вид:
Пункт 6. Построение переходного процесса
Подставляем
Строим вещественную характеристику замкнутой системы, ее годограф изображен на рисунке 6.1 и разбиваем ее на три трапеции.
Рис. 6.1. Построение вещественной характеристики и ее аппроксимация трапецеидальными характеристиками. Таблица 6.1 Значения ВЧХ скорректированной системы
Вычислим для каждой трапеции её характеристики:
Где:
æ i = Составим для каждой трапеции переходный процесс с помощью таблицы h-функций [2]. Формулы для вычисления t и h(t) [1]:
Таблица 6.2 Таблица h(t)-значений каждой трапеции.
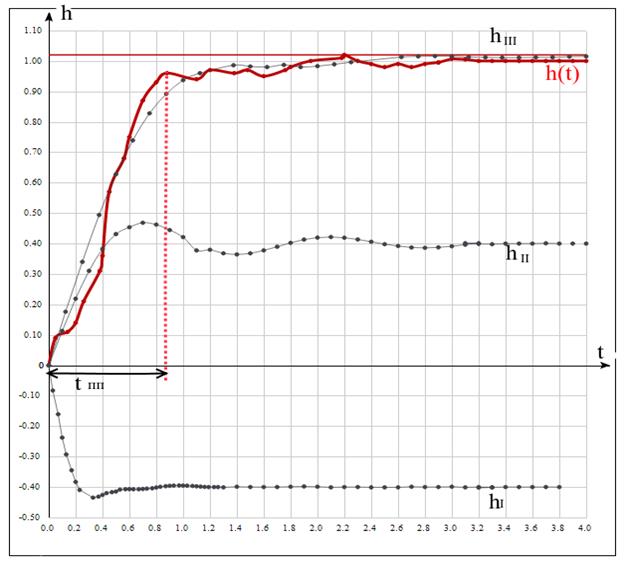
Строим переходной процесс для каждой трапеции, затем методом графического сложения и вычитания получаем искомый переходной процесс для нашей передаточной функции.
Рис 6.2. Построение переходного процесса. Определение показателей качества: hуст = 1; hmax = 1, 02; ε =1 - hуст = 0; tпп = 0, 867 с; σ = (hmax - hуст)/hуст = 2%. Полученные показатели качества не превышают требуемые.
Рис 7.1. Структурная схема нелинейной системы.
Для исследования необходимо преобразовать структурную схему таким образом, чтобы нелинейная и линейная части располагались последовательно:
Рис. 7.2. Общая схема нелинейной системы.
Запишем передаточную функцию линейной части системы:
Тогда:
По заданию дано идеальное двухпозиционное реле. Параметр
Рис 7.4. График нелинейности. Комплексный коэффициент усиления нелинейного элемента:
Начальная точка годографа равна:
Нелинейный элемент имеет центрально симметричную характеристику; отсюда следует, что q1 = 0.
Рис. 7.5. Годограф обратного инверсного коэффициента Чтобы найти частоту и амплитуду возможных периодических решений, нужно приравнять передаточную функцию линейной части системы и обратный инверсный коэффициент [1]
Это уравнение можно решить графико-аналитическим способом, чтобы добиться большей точности. Графическое решение состоит в том, чтобы найти точки пересечения годографа передаточной функции с действительной осью, тогда как мнимая часть будет равна нулю. Ниже на рисунках 7.6, 7.7 и 7.8 представлены графики в разных масштабах – тысяч, сотен и единиц:
Рис. 7.6. Годограф АФЧХ линейной части в масштабе тысяч. При
Рис 7.7. Годограф АФЧХ линейной части в масштабе сотен. На рисунке 7.7 первое пересечение годографа попадает на точку
Приступим к аналитическому способу: мы выделим мнимую часть
Положительные корни этого уравнения: Рис. 7.8. АФЧХ линейной части в единичном масштабе.
Поочередно подставляем в действительную часть:
Сделаем проверку гипотеза фильтра для найденных периодических решений:
Гипотеза фильтра выполняется.
Найдем коэффициент гармонической линеаризации (комплексный коэффициент усиления):
Учитывая, что
Для первого решения
Для второго решения
Для определения устойчивости периодических решений необходимо построить Рассматриваем устойчивость первого решения. Возьмем приращение амплитуды
АФЧХ для
Рис 7.9. АФЧХ полученной нелинейной системы при Рис 7.10. АФЧХ нелинейной системы при приращении амплитуды первого решения. Рис. 7.11. АФЧХ нелинейной системы при уменьшении амплитуды первого решения. При приращении амплитуды годограф проходит правее точки (-1; 0j), при этом не охватывает ее. При уменьшении годограф проходит левее точки (-1; 0j). Поэтому периодическое решение Устойчивость второго решения, примем
Рис. 7.12. АФЧХ нелинейной системы при
Рис. 7.13. АФЧХ нелинейной системы при уменьшении амплитуды второго решения.
Рис. 7.14. АФЧХ нелинейной системы при увеличении амплитуды второго решения. По рисункам 7.13 и 7.14 наблюдаем охват точки (-1; 0j) в случае приращения амплитуды, и неохват при уменьшении. Значит, второе решение неустойчиво. Делаем общий вывод: в исследуемой системе автоколебания возможны.
Выводы по работе
Были изучены основы теории управления и применены на практике. Исследованы динамики нескорректированной системы управления с помощью критерия Рауса. Изучен и применен аналитический метод синтеза скорректированной системы с требуемыми показателями качества. Определено влияние нелинейных характеристик элементов на динамику скорректированной системы.
Список использованной литературы 1.Боголюбов А.А. «Конспект лекций по курсу ОТУ», 2016. 180с. 2.Бесекерский В.А., Попов Е.П. «Теория систем автоматического регулирования», Москва, 1975. 768 с. 3.Попов Е.П. «Теория линейных систем автоматического регулирования и управления», 2-е издание, 1989. 304 с. 4.Кузьмин А.В., Схиртладзе А.Г. «Теория систем автоматического управления», Старый Оскол, 2016. 223 с.
Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 1033; Нарушение авторского права страницы






 , тогда:
, тогда: 






 ;
;  ;
;  );
);  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  .
. , где
, где  , выбираются из номограмм качества. Остальные находятся по формуле
, выбираются из номограмм качества. Остальные находятся по формуле  .
. , где
, где  - нормированное время переходного процесса (определяется по выбранной в номограмме точке). Использованные номограммы качества приведены на рисунках 5.2, 5.3, 5.4 и 5.5.
- нормированное время переходного процесса (определяется по выбранной в номограмме точке). Использованные номограммы качества приведены на рисунках 5.2, 5.3, 5.4 и 5.5.
 .
.
 .
.
































 , 5
, 5 



























 в передаточную функцию скорректированной замкнутой системы, найденной в пункте 5, и выделяем действительную составляющую:
в передаточную функцию скорректированной замкнутой системы, найденной в пункте 5, и выделяем действительную составляющую: 




 ,
, 
 Пункт 7. Исследование системы с нелинейным элементом
Пункт 7. Исследование системы с нелинейным элементом

 где
где

 Рассмотрим нелинейность системы:
Рассмотрим нелинейность системы:  .
.





 годограф АФЧХ, представленный на рисунке 7.6. пересекает мнимую ось два раза.
годограф АФЧХ, представленный на рисунке 7.6. пересекает мнимую ось два раза.
 ; 0), что соответствует
; 0), что соответствует  . Второе пересечение годографа хорошо видно на рисунке 7.8, оно встречается в точке
. Второе пересечение годографа хорошо видно на рисунке 7.8, оно встречается в точке , где
, где  .
. и найдем корни уравнения
и найдем корни уравнения  .
. 


 . Значения периодических решений совпадают с теми, что мы получили графически.
. Значения периодических решений совпадают с теми, что мы получили графически.













 и
и  , найдем амплитуду возможных периодических решений, решив уравнение гармонического баланса относительно
, найдем амплитуду возможных периодических решений, решив уравнение гармонического баланса относительно  :
: 


 и
и  . Если при положительном приращении амплитуды кривая
. Если при положительном приращении амплитуды кривая  не будет охватывать
не будет охватывать  , а при отрицательном будет, то решение устойчиво и неустойчиво в противном случае.
, а при отрицательном будет, то решение устойчиво и неустойчиво в противном случае. , тогда
, тогда
 и для
и для изображена на рисунках 7.10 и 7.11 соответственно.
изображена на рисунках 7.10 и 7.11 соответственно.
 .
.

 :
: 

 =
= 

