
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Инструментальная модель системы автоматического регулирования температуры
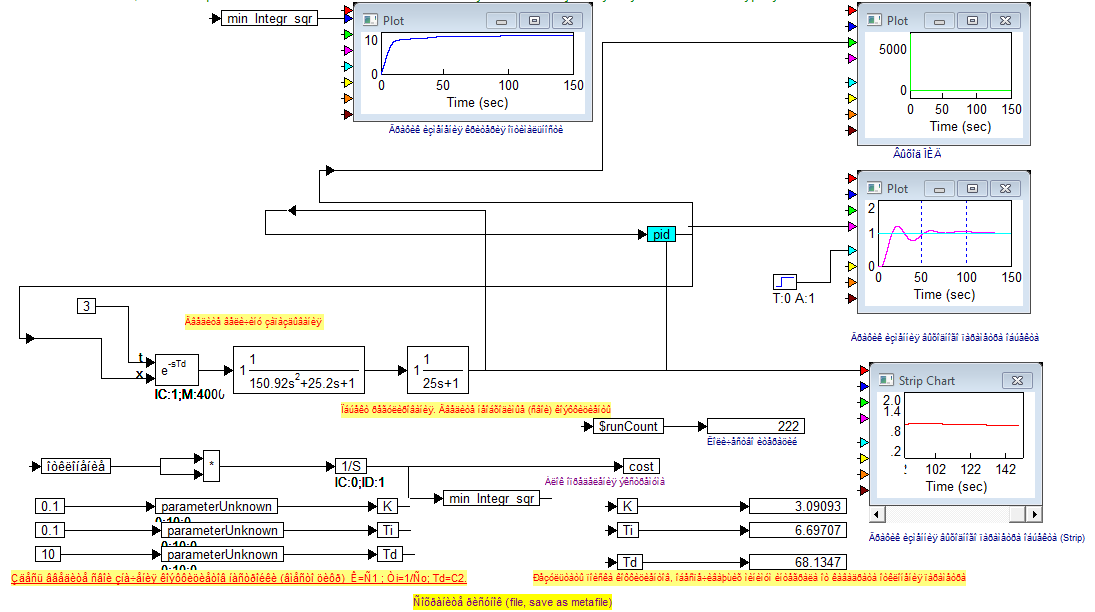
Реализовать модель будем в пакете MATLAB, при этом воспользуемся инструментом визуального моделирования SIMULINK. Представим четыре модели в виде подсистем: модель объекта регулирования, модель формирователя возмущений, модель исполнительного устройства и модель регулятора. Общая схема инструментальной модели, системы автоматического регулирования температуры в емкости, представлена на рисунке 2.13.
Рисунок 2.13 – Модель регулирования температуры в резервуаре Состав модели: Блок формирования
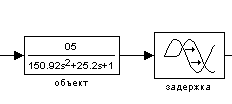
Рисунок 2.14 – Блок формирования относительного управляющего сигнал Передаточная функция объекта регулирования рисунок 2.15:
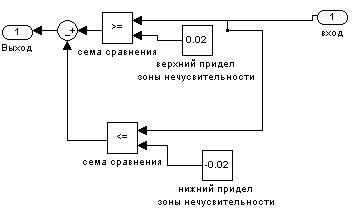
Рисунок 2.15 – Передаточная функция объекта Блок ПДД2-регулятора рисунок 2.16
Рисунок 2.16 – Блок ПДД2 – регулирования Блок широтно-импульсного модулятора ПДД2 регулятора приведена на рисунке 2.17
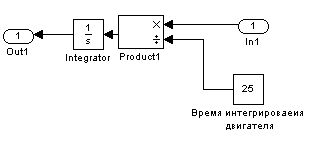
Рисунок 2.17 – модель широтно-импульсного модулятора модель ПДД2-регулятора Модель двигателя приведена на рисунке 2.18
Рисунок 2.18 – модель двигателя переменного тока
Расчет настроек регулятора температуры
Расчёт проведем методом Циглера – Никольса. В соответствии с этим методом расчёт настроек ПИ- или ПИД- регуляторов проводят в два этапа: - расчет критической настройки пропорциональной составляющей С1кр (С0 = 0, С2 = 0 ), при которой АСР будет находится на границе устойчивости и соответствующую ей критическую частоту - определение по С1кр и Зная передаточную функцию объекта С1кр и ω кр можно определить аналитически: Тогда решая систему уравнений получим:
Оптимальные настройки регуляторов находятся по формулам: П – регулятор С1 = 0, 5∙ С1кр . (1) ПИ – регулятор С1 = 0, 5∙ С1кр ; (2) С0 = 0, 086∙ С1кр . ПИД – регулятор С1 = 0, 6∙ С1кр; С0 = 0, 192∙ С1кр∙ ω кр; (3) С2 = Метод Циглера —Никольса лежит в основе многих методов настройки дискретных ПИД – регуляторов. АСР температуры представляет собой одноконтурную АСР. Температура регулируется путем изменения расхода пара. Структурная схема представлена на рисунке 2.19. Рисунок 2.19 – Структурная схема АСР регулировки температуры Для определения критической настройки регулятора все настройки регулятора приравнивают к нулю, а затем постепенно добавляя значение С1, выводят систему автоматического регулирования на грань устойчивости. Настройка, при которой система будет находиться на грани устойчивости и будет являться критической. Определим настройки ПИД – регулятора с помощью программы. Листинг программы: function PID w = 0.01 tau=0; K=0.5; i=0; while i< =1000 p=(+1i)*w*i; i=i+1; W=K/(150.92*p*p+25.2*p+1)*exp(-tau*p)*Кд; A =W; AO(i)= real(A); A1(i)=imag(A); if A1(i)> 0 wkr=w*i; C1kr=-1/AO(i); i=500001; end end i=10 plot(AO, A1) C1 = 0.6*C1kr C0 = 0.192*C1kr*wkr C2 = 0.471*C1kr/wkr C=wkr Соответствие найденных настроек ПИД - регулятору и ПДД2 – регулятору: С1=P=D, С0=I=P, С2=D=D2. С1=1.4981; С0=0.1342; С2=4.2; wкр кр=0.28. С1кр=2.49 Переходной процесс полученный в результате моделирования на рисунке 2.20
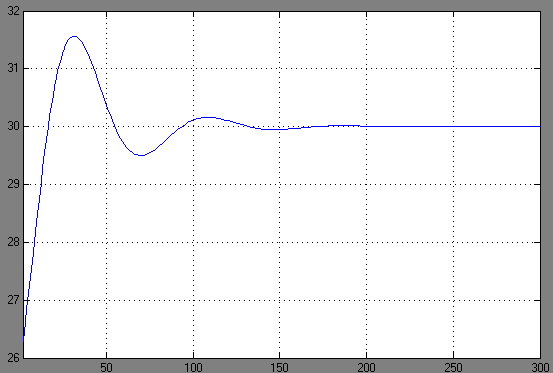
Рисунок 2.20– переходной процесс После определения коэффициентов настройки регулятора методом Циглера – Никольса в Матлабе, определяются коэффициенты настроек методом Пауэлла. В результате получены следующие настройки рисунок 2.21: Расчет настроек методом Пауэлля представлен в таблице 2.20
Рисунок 2.21 – Расчет настроек регулятора методом Пауэлля Для сравнения показателей качества переходных процессов при расчетных и оптимальных настройках регулятора, они построены в одной координатной плоскости на рисунке 2.22.
Рисунок 2.22 – Переходный процесс модели регулирования расхода при допустимых и оптимальных настройках регулятора Для оценки результатов эксперимента были использованы следующие показатели качества регулирования: - максимальное перерегулирование – максимальное отклонение переходной характеристики от установившегося значения переходной величины, выраженное в относительных единицах.
Обычно σ max ≤ 20÷ 30%; - время регулирования – tрег – минимальное время от начала нанесения возмущения до момента, когда регулируемая величина будет оставаться близкой к установившемуся значению с заданной точностью. |h(t) – hуст| ≤ ∆, где ∆ - постоянная величина, значение которой нужно оговаривать (обычно ∆ =2÷ 5% hуст). В результате проведенных операций мы рассчитали систему регулирования на заданную степень затухания Перерегулирование составит По полученным переходным процессам сделаем таблицу для сравнения настроек регулятора и показателей качества процесса таблица 2.4. Таблица 2.4 – Сравнение показателей качества переходных процессов
В результате проведенных исследований были получены математически модели объекта регулирования, исполнительного устройства, регулятора, произведен расчет настроек регулятора, проведена оптимизация настроек регулятора, выполнено моделирование в среде Vissim и получены допустимые настройки ПДД2-регулятора методом Циглера – Никольса.
Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 950; Нарушение авторского права страницы

 рисунок 2.14:
рисунок 2.14: 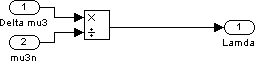


 оптимальных настроек С0, С1, С2 обеспечивающих степень затухания
оптимальных настроек С0, С1, С2 обеспечивающих степень затухания 
 .
.
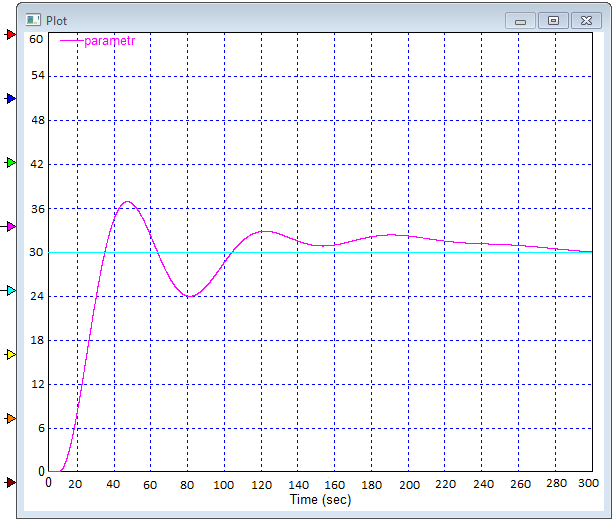

 . Время регулирования процесса составляет около 250секунд.
. Время регулирования процесса составляет около 250секунд.