|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Разработка системы управления устойчивостью крана в период действия высоких ветровых нагрузок
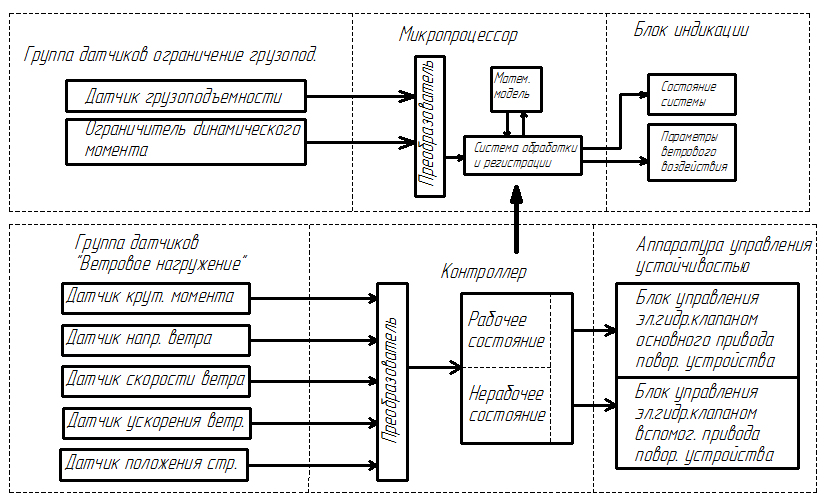
Расчет влияния ветрового потока на кран необходим для определения ветровых нагрузок на конструкцию с последующим вычислением как собственной, так и грузовой устойчивости, а также при проектировании или разработке приборов безопасности. Существующие нормы расчета кранов на ветровую нагрузку основаны на коэффициентах, учитывающих лобовое сопротивление, изменение динамического давления по высоте, динамическое давление и наветренную площадь конструкции. Коэффициент лобового сопротивления – безразмерная величина, зависящая от формы и размеров обтекаемого тела, определяемая опытным путем. При расчете ветровой нагрузки, как для рабочего, так и для нерабочего состояния крана, аэродинамическое сопротивление определяют для каждой отдельной части крана коэффициентам для типовых элементов. Любое сложное двунаправленное положение элементов конструкции приводит к ошибочному определению коэффициента лобового сопротивления. Наличие неправильных форм сечений элементов, также осложняет поиск и определение данного параметра. Другой коэффициент определяет зависимость между высотой над поверхностью земли и скоростью ветра. Для упрощения расчетов данный коэффициент дается в линейной зависимости. В [12] установлено что, при различных способах задания скоростного напора ветра по высоте крана (постоянный, ступенчатый, степенной) и формы наветренной площади, в расчетах, скоростной напор ветра можно принимать постоянным в пределах высоты отдельных частей крана (стрела, поворотная платформа и т.д.). При этом величина давления должна приниматься на высоте равной половине высоты исследуемой конструкции. Это условие является упрощением зависимости распределения давления ветра по высоте крана, которая представляет собой степенную функцию. Коэффициент динамического давления представляет собой половину произведения плотности воздуха и квадрата скорости ветрового потока. Важным коэффициентом при определении ветровой нагрузки, является наветренная площадь крана. При действии ветровой нагрузки на конструкцию стрелового устройства не представляется возможным учесть затененные участки, которые так же подвержены ветровому воздействию. При небольших поворотах стрелы либо других сборочных единиц составной формы, относительно ветрового напора, происходит увеличение наветренной площади вследствие перехода затененных участков в наветренные. Так же отсутствуют моментные характеристики для конструкций стреловых устройств. Аэродинамические моменты, действующие на стреловое устройство относительно вертикальной оси вращения крана, определяются расчетным путем по аэродинамическим силам, известным для отдельных элементов, без учета моментов, действующих на эти элементы. Расчет аэродинамических коэффициентов крановых конструкций, имеющих сложные комбинации и взаимное расположение элементов, например, ступенчатые стреловые устройства, которые в последнее время находят широкое применение, с различным набором сечений трубчатых раскосов, представляется достаточно сложным. Физическое моделирование в аэродинамической трубе несет ряд трудностей, связанных с масштабированием и исполнением модели, исследуемой конструкций крана. Любые незначительные отклонения при изготовлении масштабной модели крана, приводят к существенной погрешности вычислений. Другим существенным недостатком моделирования ветрового воздействие в обычной аэродинамической трубе является постоянство скорости ветра по высоте. В последнее время для решения задач аэродинамики и механики сплошных сред широкое применение находят компьютерные CAE-системы, математического моделирования, основанные на методе конечных элементов (МКЭ) и методе конечных объемов (МКО). В состав современных расчетных комплексов входят универсальные модули, объединенные в логические группы по функциональной принадлежности. Обычные персональные компьютеры обеспечивают адекватные ресурсы лишь при решении двумерных задач, что для моделирования ветровой нагрузки крановых конструкций не приемлемо. Для проведения сложных трехмерных расчетов с помощью перечисленных CFD-пакетов требуются дорогостоящие высокопроизводительные многопроцессорные системы. Основные задачи численного моделирования: 1. Построение математической модели ветрового нагружения крана. 2. Определение критического давления скорости ветра рабочего и нерабочего состояния на металлоконструкцию крана. 3. Построение зависимости по данным математического моделирования скорости ветра, положения стрелы и крутящего момента создаваемого ветровым потоком относительно оси вращения крана. 4. Определение влияния положения стрелы относительно направления ветрового потока на устойчивость крана. На практике могут возникать ситуации, когда скорость ветра принимает резко возрастающий характер. В таком случае очень важно быстродействие системы корректировки устойчивости, которое обеспечивается системой управления активным вспомогательным приводом поворотной платформы крана. Для этого в аппарат нечеткой логики данной системы управления вводится лингвистическая переменная «ускорение ветра», выполняющая прогностическую функцию, что в условиях резко изменяющихся скоростей ветрового потока позволяет скорректировать положение стрелы крана до того, как коэффициент запаса устойчивости примет критическое значение. Внедрение вспомогательного привода поворотной платформы крана позволяет обеспечить максимум быстродействия при возникновении опасных ускорений за счет того, что кран принимает устойчивое положение с максимально возможной скоростью. Исследование этого процесса проведено в программном пакете Simulink среды MATLAB посредством синтеза системы автоматического регулирования привода поворотной платформы, а входные управляющие сигналы для моделируемой системы управления формируются посредством системы нечетких правил. Входными лингвистическими переменными для этой системы являются «ускорение ветра», «скорость ветра», и «положение стрелы», выходными «команда управления вспомог. приводом», «состояние гидромуфты». При активизации данной системы на блок индикации поступает предупредительный сигнал о возможной опасности. Составим нечеткий алгоритм для работы системы с данными входными и выходными лингвистическими переменными. Лингвистической переменной «ускорение ветра» будут соответствовать два терма – «norma», «danger» принадлежащие нечеткому множеству «uskorenie», со значениями [0, 5; 1], [0, 5; 2, 5] с координатами максимума 1, 2, 5м/с и коэффициентами концентрации соответственно 0, 8 и 1, 7. Лингвистической переменной «скорость ветра» будут соответствовать два терма – «norma», «danger» принадлежащие нечеткому множеству «skorost», со значениями [0, 5; 5], [0, 5; 10] с координатами максимума 5, 10м/с и коэффициентами концентрации соответственно 1, 5 и 5, 2. Лингвистической переменной «положение стрелы» соответствуют три терма – «0-10», «10-50», «50-90» принадлежащие множеству «polojenie» со значениями функциональной принадлежности – [10 0]; [15 45]; [15 90], где 0, 45 и 90 – значение угла, выраженное в градусах, а 10, 15 и 15 – коэффициенты концентрации. Выходные лингвистические переменные будут формировать исполняющие сигналы управления оборудованием вспомогательного привода поворотной платформы. Это выходная лингвистические переменные «команда управления двигателем» и «команда управления гидромуфтой». Лингвистической переменной «команда управления двигателем» соответствуют термы «вкл» и «выкл», а лингвистической переменной «команда управления гидромуфтой» – термы «открыта», «закрыта». На основании представленной модели разработаем функциональную схему системы управления устойчивостью крана КЖ-461 (рисунок 2.3).
Рисунок 2.3 – Функциональная схема системы управления устойчивостью Сформированный в результате информационный массив, который характеризует состояние системы, позволяет достоверно определить на базе нечеткой модели устойчивости железнодорожного крана КЖ-461 текущее значение параметра ветрового нагружения и параметра состояния устойчивости.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 961; Нарушение авторского права страницы