
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Раздел 1. Часть 1. ОЦЕНКА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ (НДС) МАТЕРИАЛОВСтр 1 из 15Следующая ⇒
Оглавление Раздел 1. Часть 1. ОЦЕНКА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ (НДС) МАТЕРИАЛОВ 4 1. ОСНОВЫ ТЕОРИИ НАПРЯЖЕНИЙ 4 Теория упругости, пластичности и ползучести. 4 Краткий исторический очерк развития теории упругости пластичности и ползучести 5 1.1.Основные гипотезы, принципы и определения. 9 1.2 Полное напряжение в точке некоторой площадки в массиве. 12 1.3.Уравнения равновесия элементарных объемов в массиве. 16 1.4. Напряжения в точке произвольной наклонной площадки. 20 1.5.Теорема о главных напряжениях. 21 1.6. Максимальные касательные напряжения. 24 1.7. Девиатор напряжения. 26 2 ОСНОВЫ ТЕОРИИ ДЕФОРМАЦИИ 28 2.1 Составляющие перемещения и деформации. Зависимость между ними 28 2.2. Объемная деформация. 32 2.3. Тензор деформации. 33 2.4. Уравнения неразрывности деформаций. 36 3. ОБОБЩЕННЫЙ ЗАКОН ГУКА 40 3.1. Выражение деформаций через напряжения. 40 3.2. Выражение напряжений через деформации. 43 3.3. Закон Гука в тензорной форме. 45 3.4. Работа упругих сил. Потенциальная энергия деформаций. 47 4. О РЕШЕНИИ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ 50 4.1. Основные уравнения теории упругости и способы их решения. 50 4.2. Решение задачи теории упругости в перемещениях. 53 4.3. Решение задачи теории упругости g напряжениях при постоянстве объемных сил 56 4.4. Типы граничных условий на поверхности тела. 58 4.5. Теорема единственности. Методы решения задачи. 59 теории упругости. 59 5. ПРОСТЕЙШИЕ ЗАДАЧИ ТЕОРИИ УПРУГОСТИ 62 5.1. Чистый изгиб прямого призматического бруса. 62 5.2. Кручение круглого бруса постоянного сеченИя. 71 6. ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ В ПРЯМОУГОЛЬНЫХ КООРДИНАТАХ 75 6.1. Плоская деформация. 75 6.2. Обобщенное плоское напряженное состояние. 79 6.3. Решение плоской задачи 8 напряжениях, функция напряжений. 81 6.4. Методы решения плоской задачи для прямоугольных односвязных областей 84 РАСЧЕТ ПРОСТРАНСТВЕННЫХ КОНСТРУКЦИЙ ПОДЗЕМНЫХ СООРУЖЕНИЙ МЕТОДОМ КОНЕЧНЫХ ЭЛЕМЕНТОВ 88 Основные положения метода. 88 6.5. Изгиб консоли силой, приложенной на конце. 95 6.6. Балка на двух опорах под действием равномерно распределенной нагрузки 100 6.7. Треугольная подпорная стенка. 104 6.8. Расчет балки-стенки. 110 6.9. Обоснование принципа Сен-Венана. 116 7 ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ В ПОЛЯРНЫХ КООРДИНАТАХ 118 7.1. Основные уравнения. 118 7.2. Простое радиальное напряженное состояние. 125 7.3. Клин, нагруженный в вершине сосредоточенной силой. 127 7.4. Сжатие клина. 130 7.5. Изгиб клина. 133 7.6. Действие сосредоточенной сипы, приложенной к границе полуплоскости 135 7.7. Функция напряжений для плоской задачи в полярных координатах 140 7.8. Осесимметричные задачи. Решение в перемещениях. 142 7.9. Расчет трубы с толстыми стенками (задача Ламе) 144 7.10. Решение осесимметричной задачи с помощью функции напряжений 148 7.13. Понятие о действии сосредоточенной силы на упругое полупространство 150 СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ 154
Раздел 1. Часть 1. ОЦЕНКА НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ (НДС) МАТЕРИАЛОВ Основы теории напряжений Теория упругости, пластичности и ползучести Теория упругости и пластичности представляет собой раздел механики, изучающий деформации в твердом теле, вызванные физическими воздействиями, и возникающие при этом внутренние силы как в состоянии покоя, так и в состоянии движения. Такие же задачи решаются в сопротивлении материалов. Однако между теорией упругости и пластичности и сопротивлением материалов имеются существенные различия, которые заключаются прежде всего в исходных предпосылках и методах решения задач. В сопротивлении материалов рассматриваются приближенные теоретические методы, использующие кинематические или статические гипотезы (например, гипотеза плоских сечений), причем основным объектом сопротивления материалов являются элементы стержневых систем. Основные предпосылки теории упругости и пластичности отличаются большей широтой и для разработки расчетных методов используется математический аппарат более строгий, чем в сопротивлении материалов. В теории упругости и пластичности рассматриваются задачи, которые не могут быть решены методами сопротивления материалов. Кроме того, аппарат теории упругости и пластичности позволяет дать оценку точности решения задач, рассматриваемых в сопротивлении материалов. В теории упругости и пластичности применяют и приближенные методы. В связи с этим различают математическую и прикладную теорию упругости и пластичности, причем в последнем случае решение задач базируется на ряде дополнительных допущений. Рассматриваемая в данном пособии теория упругости называется классической или линейной. В ее основе лежит представление об идеально упругом теле (материале). Для такого тела характерна наиболее простая линейная зависимость между напряжениями и деформациями и диаграмма растяжения— сжатия представляет собой наклонную прямую проходящую через начало координат Если материал даже при малых напряжениях не подчиняется линейному закону деформирования или процесс деформирования перешел за предел пропорциональности и диаграмма изображается кривой, то в качестве физического закона деформирования следует принять уравнение этой кривой s = f(e). Если при медленной разгрузке процесс будет протекать по кривой, повторяя в обратном порядке те же состояния, что и при нагружении, а график процесса возвратится в начальную точку О, то такой материал принято называть нелинейно упругим. Законы деформирования нелинейно упругого тела изучаются нелинейной теорией упругости. Теория пластичности в отличие от теории упругости рассматривает тела, которые не подчиняются законам упругости либо с самого начала приложения к ним внешних воздействий, либо начиная с некоторой стадии нагружения. Теория ползучести в отличие от теории упругости и пластичности изучает изменение во времени напряжений и деформаций в твердом теле, возникших в результате начального нагружения. Реальные деформируемые твердые материалы обладают разнообразными механическими свойствами. Поэтому в рамках названных выше теорий применяются различные расчетные модели материалов, отражающие специфику их деформирования под нагрузкой. С моделями таких материалов и методами их расчета можно познакомиться по более полным руководствам. Девиатор напряжения Так как материалы обладают, как правило, различными механическими свойствами по отношению к сдвигу и равномерному всестороннему сжатию, выгодно представить тензор напряжения в виде суммы [1]
где
— тензор, характеризующий касательные напряжения в данной точке и называемый девиатором напряжения. Нормальные составляющие последнего (т. е. sx-s, sy-s, sz-s будем иногда обозначать через sx, sy, sz. Главные направления, девиатора напряжения Ds, и тензора напряжения Тsсовпадают, а главные значения si отличаются от si на величину среднего давления и определяются, очевидно, кубическим уравнением
все корни которого также вещественны. Инварианты девиатора легко получить из (1.9), если заменить s1, s2, s3 соответственно на s1, s2, s3:
Очевидно, что девиатор напряжения характеризуется лишь пятью независимыми величинами. Неотрицательную величину
называют интенсивностью касательных напряжений. Интенсивность касательных напряжений обращается в нуль только в том случае, когда напряженное состояние является состоянием гидростатического давления. Для чистого сдвига
где t — напряжение сдвига. Следовательно, Т = t. В случае простого растяжения (сжатия) в направлении оси х тогда
Как уже указывалось, Отсюда вытекает неравенство, установленное иным путем А. А. Ильюшиным: ОСНОВЫ ТЕОРИИ ДЕФОРМАЦИИ Объемная деформация В общем случае деформирования объем тела изменяется. Рассмотрим бесконечно малый параллелепипед объемом dV = dxdydz. С точностью до бесконечно малых величин высшего порядка можно считать, что изменение этого объема связано только с изменением длины ребер, но не с угловыми деформациями. Длина ребра АВ (см. рис.2.3), первоначально равная dx, после деформирования согласно формуле (2.1) составит dx1= dx (1 +ди/дх). Воспользовавшись первым уравнением (2.3), получим dx1= dx (1 + ex). (2.4) Аналогично вычисляются длины двух других ребер после деформирования:
Объем параллелепипеда после деформирования найдем как произведение новых длин ребер:
Раскрывая скобки, получаем
Пренебрегая в скобках величинами второго и третьего порядков малости и учитывая, что dxdydz = dV, находим
Тензор деформации Пусть при деформации среды точки последней получили смещение и, составляющие которого обозначим через их, иу, иz. Деформация среды характеризуется симметричным тензором деформации
составляющие которого равны
Тензор деформации, как и всякий симметричный тензор, приводится к главным осям:
причем e1, e2, e3 называются главными удлинениями. Это означает, что всякая деформация может быть осуществлена простыми растяжениями в трех взаимно перпендикулярных направлениях (главных направлениях). Разности
называются главными сдвигами. Наибольший по величине сдвиг в данной точке будем называть максимальным сдвигом gmax. 2. Малая деформация. В случае малой деформации компоненты ex, ey, ..., gхz малы по сравнению с единицей; если, кроме того, достаточно малы углы поворота (анализ этого вопроса дан в курсе теории упругости В. В. Новожилова Г271), то в формулах (2.1) можно пренебрегать произведениями
Здесь ex, ey, ez представляют собой относительные удлинения соответственно в направлениях осей х, у, z, аgхy , gyz , gxz относительные сдвиги (gхy —изменение угла между осями х, у и т. д.); Относительное изменение объема равно
Эти геометрические соотношения были выведены Коши и называются уравнениями Коши. Эти простые формулы непригодны, если необходимо описать значительные формоизменения массивных тел; тогда компоненты деформации сравнимы по величине с единицей, и нужно исходить из общих зависимостей (2.8). Подчеркнем также, что даже при малых удлинениях и сдвигах линейные соотношения (2.9) часто оказываются недостаточными в вопросах деформации и устойчивости гибких тел (стержни, пластины, оболочки) вследствие того, что элементы тела испытывают значительные перемещения и повороты. В дальнейшем, говоря о малой деформации, мы будем подразумевать такую деформацию, когда формулы (2.9) применимы. Ниже нередко используются тензорные обозначения компонент деформации
где xi — декартовы координаты, иi составляющие вектора перемещения. Легко видеть, что 3. Инварианты. Инварианты тензора деформации образуются так же, как для тензора напряжения, и в главных осях имеют вид:
Удобно пользоваться представлением тензора деформации в виде суммы
где
характеризует изменение формы элемента среды, обусловливаемое сдвигами. Инварианты девиатора деформации равны
В теории пластичности важную роль играет квадратичный инвариант I2 (De), который можно рассматривать как суммарную характеристику искажения формы элемента среды. Неотрицательная величина
называется интенсивностью деформаций сдвига [2] ). В случае чистого сдвига
Внося эти значения в (2.1), находим:
Численный множитель перед корнем в (2.9) выбран так, чтобы при чистом сдвиге интенсивность r равнялась величине сдвига у. ОБОБЩЕННЫЙ ЗАКОН ГУКА Теории упругости При решении задач теории упругости может возникнуть вопрос о том, является ли полученное решение однозначным, т. е. соответствует ли заданным объемным и поверхностным силам одна система напряжений или их несколько. Докажем следующую теорему. Для тела, находящегося в естественном состоянии, решение задачи теории упругости единственно, если справедлив принцип независимости действия сил. Предположим обратное: под действием заданных поверхностных Xv, Уv, Zv и объемных X, У, Z сил возможно возникновение двух различных совокупностей напряжений:
Обе совокупности должны удовлетворять уравнениям равновесия (4.1):
и условиям на поверхности (4.2):
Вычтя почленно соответствующие уравнения систем (а) и (б), получим новую систему уравнений равновесия:
и условий на поверхности:
На основании принципа независимости действия сил разности напряжений, входящие в эти системы уравнений, можно принять за новую совокупность напряжений, которая согласно уравнениям (в) и (г) возникает при отсутствии объемных и поверхностных сил. Но для тела, находящегося в естественном состоянии, эти напряжения должны быть равны нулю, т. е,
или
Следовательно, обе совокупности напряжений совпадают и решение задачи теории упругости, когда заданы объемные и поверхностные силы, единственно. Точно так же можно доказать единственность решения задачи теории упругости и в случае, когда на поверхности упругого тела заданы перемещения. Из доказанной теоремы следует: так как решение задач теории упругости единственно, то безразлично, каким математическим методом она решена. Можно указать три основных метода математического решения задачи теории упругости: L Прямой метод. Он заключается в непосредственном интегрировании уравнений теории упругости совместно с заданными условиями на поверхности. 2. Обратный м е т о д. В этом случае задаются функциями перемещений или напряжений, удовлетворяющими дифференциальным уравнениям, и определяют, каким внешним нагрузкам соответствует рассматриваемая система перемещений или напряжений. 3. Полуобратный метод Сен-Венана. Он состоит в задании части функций напряжений или перемещений. Затем с помощью уравнений теории упругости устанавливаются зависимости, который должны удовлетворять оставшиеся функции напряжений и перемещений. При этом дифференциальные уравнения настолько упрощаются, что решение их не представляет особых трудностей. Полуобратный метод является одним из наиболее эффективных методов решения задачи теории упругости.
Плоская деформация Все уравнения теории упругости значительно упрощаются в тех случаях, когда задачу можно свести к отысканию функций только двух переменных, например х и у. В упругом теле плоская деформация возникает, если перемещения происходят только параллельно плоскости хОу:
Такие перемещения возникают в длинном призматическом или цилиндрическом теле, продольная ось которого параллельна оси Оz, при действии нагрузки, перпендикулярной этой оси и постоянной вдоль нее. Близкими к этому случаю являются задачи о длинной подпорной стенке или плотине (рис. 6.1, а), тоннеле метрополитена (рис. 6.1, б), длинном цилиндрическом катке (рис. 6.1, в), длинной пластинке (рис. 6.1, г) при условии, что нагрузка не меняется вдоль оси Оz. В таких задачах приходится иметь дело с деформациями, которые возникают только в плоскости хОу. Подставляя составляющие перемещения (а) в формулы (4.3), получаем
Отсутствие линейных деформаций в направлении оси Оz ведет тем не менее к появлению нормальных напряжений sz. Эти напряжения зависят от напряжений, действующих в плоскости хОу, Действительно из третьей формулы закона Гука (4.5) при отсутствии деформации ez следует, что
откуда
(в)
Рис 6.1
Из анализа формул (б), (в) и (4.6) следует, что
На основании соотношения (6.1) напряжения
Основные уравнения теории упругости в случае плоской деформации упрощаются следующим образом. Из дифференциальных уравнений равновесия (4.1) остаются только два:
(6.2) а третье обращается в тождество Так как на боковой поверхности во всех точках направляющий косинус
(6.3) Шесть геометрических соотношений Коши (4.3) сводятся к трем:
(6.4) Из шести уравнений неразрывности деформаций (4.4) остается только одно:
(6.5) а остальные обращаются в тождества. Из шести формул закона Гука (4.5). с учетом соотношений (б), (в) и (3.1) остаются только три:
(г) Если ввести новые упругие постоянные
(6.6) то эти формулы примут более удобный вид:
(6.7) причем значение коэффициента пропорциональности в третьем уравнении не меняется:
Основные положения метода В последнее время в связи с широким распространением средств вычислительной техники для исследования напряженного состояния массива используются различные численные методы. Наибольшее распространение среди этих методов получил метод конечных элементов. В методе конечных элементов рассматриваемая область разбивается на конечное число элементов. Для плоской задачи обычно принимаются треугольные элементы. При этом связь между элементами осуществляется только в вершинах I, J, k (узлах). Следовательно, условия равновесия и условия совместности деформаций соблюдаются только в общих (внутренних) узлах элементов. На границе тела задаются усилия или перемещения. Задание условий на границе осуществляется в узлах. В итоге, по заданным граничным условиям в узлах, лежащих на границе тела, необходимо найти напряжения и перемещения в узлах, лежащих внутри тела. Таким образом, непрерывное решение задачи заменяется дискретным аналогом. Для определения неизвестных напряжений и перемещений узлов составляются уравнения равновесия и совместимости деформаций, число которых соответствует числу узлов расчетной схемы. Решение задачи выполняется с помощью ЭВМ. Очевидно, чем меньше размеры элементов, тем ближе приближенное решение приближается к точному. На практике сетка конечных элементов (размеры элементов) принимается с переменным шагом. В областях, где ожидаются большие концентрации напряжений, размер элементов принимается меньшим. Применительно к горным выработкам размер элементов принимается наименьшим около контура выработки. С удалением от выработки размер элементов можно увеличивать. Увеличение числа конечных элементов влечет за собой возрастание трудоемкости расчетов на ЭВМ. Это связано с тем, что с ростом числа элементов весьма быстро увеличивается размер системы линейных уравнений, к которой, в конечном итоге, сводится решение задачи на ЭВМ. При решении практических задач в целях уменьшения порядка системы уравнений используют геометрическую и силовую симметрию, бесконечную область заменяют конечной и выполняют другие действия. Рассмотрим последовательность решения плоской задачи теории упругости в матричной форме для треугольного элемента с узлами i, j, k, обозначенными в направлении против часовой стрелки (рис.5.1). Смещения в узле имеют 2 компоненты (рис.5.1):
где Ui, ui - компоненты смещений для узла i. Вектор смещений для всего элемента будет состоять из 6 компонентов (по 2 компонента на каждый из 3-х узлов):
где {U} - вектор узловых перемещений для элемента. Каждый из 6 компонентов (U, u) описывается с помощью линейных многочленов:
где a1, a2, … a6 - параметры, постоянные для элемента.
Рис.5.1. Схема смещений треугольного элемента Смещения узлов элемента происходят относительно их начального положения, которое описывается их координатами в декартовой системе. Следовательно, компоненты перемещений U и u треугольного элемента можно выразить как произведение матрицы декартовых координат узловых точек на матрицу-вектор параметров поля деформаций:
где {U} - вектор узловых перемещений, {a} - вектор параметров, [A] - матрица декартовых координат узлов.
Из уравнения (5.4) теперь могут быть найдены неизвестные параметры {a}:
где [A]-1 - матрица обратная матрице координат. Общие деформации элемента определяются из соотношений Коши:
Подставляя в эти уравнения выражения (5.3) для перемещений, получим
Эту формулу можно представить в виде
где Подставляя в выражение (5.9) значения параметров (5.6) получим
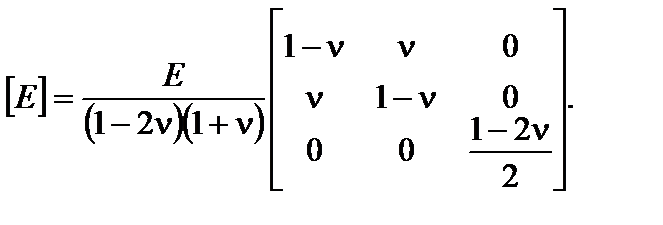
где матрица [E] для случая плоской деформации имеет вид
Подставляя в уравнение (5.10) выражения (5.9), получим выражения для напряжений через перемещения
Элементы взаимодействуют между собой только в узлах, поэтому деформирование элемента, характеризуемое вектором перемещений {u}, обусловлено действием сил, приложенных в узлах (рис.5.1).
Взаимосвязь векторов {u} и {X} определяется матрицей жесткости элемента
где [k] - матрица жесткости элемента, которая находится с использованием принципа возможных перемещений:
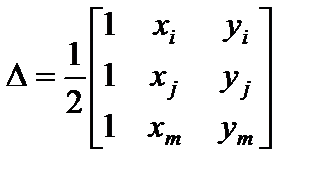
D - площадь треугольного элемента:
индекс «т» означает транспонирование матрицы. После построения сетки конечных элементов для решения конкретной задачи и определения матриц жесткости элементов строится матрица жесткости всей системы конечных элементов и составляется система линейных уравнений
где {X} и {u} - векторы сил, приложенных в узлах сетки конечных элементов и перемещений узлов:
M - число узлов в системе; [K] - матрица жесткости рассматриваемой системы, имеющая порядок 2M и состоящая из элементов
где Для решения поставленной задачи в систему уравнений (5.13) вводятся граничные условия, и эта система решается относительно перемещений. Далее с помощью выражений (5.10) и (5.12) определяются соответственно деформации и напряжения в элементах. Матрица жесткости системы (5.12) содержит координаты узлов и деформационные характеристики среды, отсюда и её название. На практике разбивка тела на элементы производится автоматически, а матрица жесткости симметрична относительно главной диагонали. МКЭ позволяет производить расчеты обделок не только на основе упругой модели взаимодействия их с массивом, но и с учетом нелинейности деформирования массива. В таких случаях вычисления производятся многократно (итерационным путем). На каждом шаге вносятся коррективы ввеличины модулей деформации элементов в соответствии с уровнем напряжений и принятой моделью упругопластического материала. Применение МКЭ позволяет значительно приблизить расчетную схему к реальному объекту, дает возможность учесть наиболее важные свойства среды, а также реальную геометрию сооружения. Использование метода МКЭ наиболее эффективно в тех случаях, когда не имеется точных аналитических решений: для расчета незамкнутых и сборных обделок; для расчета обделок, расположенных в неоднородном грунтовом массиве; для учета постадийности возведения обделки. Метод МКЭ эффективен для расчета сложных пространственных конструкций подземных сооружений. Расчет балки-стенки Балкой-стенкой называется конструктивный элемент в виде балки, высота которой соизмерима с длиной перекрываемого пролета. На примере расчета неразрезной балки-стенки можно проиллюстрировать применение к решению плоской задачи тригонометрических рядов. Решение дано Б. Н. Жемочкиным [9]. Такая балка-стенка изображена на рис. 27. Она опирается на ряд колонн, расположенных с одинаковым шагом 2l, и несет нагрузку, равномерно распределенную по верхней грани. Собственный вес балки-стенки при расчете во внимание не принимается.
Рис 27 Пусть балка-стенка имеет бесконечное число пролетов. Если исключить из рассмотрения крайние пролеты, то все остальные будут находиться в одинаковых условиях. В этом случае ось у, проходящая через ось колонны, является осью симметрии. Для выполнения условий симметрии функцию напряжений j(х, у) следует взять четной по отношению к переменной х, т, е. в формуле (6.18) необходимо сохранить только члены, содержащие cos ax:
Попытки удовлетворить всем граничным условиям поставленной задание помощью функций напряжений (а) привели к выводу, что этой функции недостаточно и к ней следует добавить алгебраический полином второй степени. Сохраняя в полиноме только четные члены по отношению к переменной х, получаем видоизмененную функцию напряжений для решения поставленной задачи:
Дифференцируя эту функцию согласно формулам (6.10) и учитывая, что объемные силы равны кулю, находим составляющие напряжений:
где по-прежнему a = np/l. Полученные формулы пригодны для всех пролетов рассматриваемой балки-стенки, так как от прибавления к абсциссе х длины 2l функция косинуса не меняется. Следовательно, в соответствующих точках всех пролетов возникают одинаковые напряжения, Для определения постоянных, входящих в формулы (б), рассмотрим граничные условия. Два условия можно записать для верхней грани. Так как эта грань несет нормальную сжимающую нагрузку интенсивностью q, то
Нижняя грань свободна от нагрузки во всех точках, кроме тех, которые лежат на осях колонн, В них приложены опорные реакции, рассматриваемые как сосредоточенные силы. Итак, имеем еще два условия:
Для включения в граничные условия опорных реакций на нижней грани рассмотрим равновесие части балки в пределах одного пролета, отсеченной горизонтальной плоскостью на произвольной высоте у (рис. 28). Из суммы проекций на ось у всех сил, действующих на выделенную часть балки, следует пятое условие:
Наконец, шестое условие получаем из рассмотрения вертикальных сечений балки. По характеру внешних нагрузок усилия в них сводятся к изгибающему моменту и поперечной силе. Поскольку продольная сила отсутствует, сумма проекций всех сил на ось х равна нулю:
Подставляя в условия (в)—(е) составляющие напряжений (б), после интегрирования и приведения подобных членов получаем следующую систему уравнений:
Из пятого уравнения (ж) находим а2 = -q. С учетом этого результата первое уравнение принимает вид
Для того, чтобы суммы членов ряда, не зависящих друг от друга равнялась нулю, необходимо и достаточно, чтобы каждый член ряд; равнялся нулю. Поэтому
Аналогично из второго уравнения (ж) получаем
а из четвертого -
Согласно формулам (и) и (к), выражение, стоящее в фигурных скобках шестого уравнения (ж), равно нулю и, следовательно, с2 = 0. Третье из уравнений (ж) после подстановки значения а2 принимает такой вид:
Для его решения нагрузку q разложим в ряд Фурье, используя известную из математики формулу
которая действительна при
Подставляем этот ряд в формулу (л):
откуда находим Ап = 2q/a2, После этого, решая совместно систему уравнений (з)—(к), находим остальные постоянные:
Учитывая, что дроби
Подставляя значения найденных постоянных в формулы (б), находим
Здесь гиперболические функции заменены экспоненциальными согласно зависимости
Ряды а формулах (м) сходятся, очень быстро во всех точках, за исключением тех, которые находятся вблизи нижнего края (при малых значениях y.
Рис. 29 Результаты вычислений для балки-стенки высотой h = 2l приведены на рис. 29 в виде эпюр нормальных напряжений sx для двух вертикальных сечений (на опоре и посередине пролета) и нормальных напряжений sy для двух горизонтальных сечений. Нетрудно убедиться, что эти эпюры заметно отличаются от эпюр, получаемых в сопротивлении материалов.
Основные уравнения При решении плоской задачи встречаются тела, ограниченные поверхностями кругового цилиндра и радиально расходящимися плоскостями. В этих случаях переход от декартовой системы координат к полярной значительно упрощает решение.
В полярной системе координат положение любой точки на плоскости определяется двумя величинами: радиус-вектором r и полярным углом q, отсчитываемым от начального радиус-вектора r0. Рассмотрим основные уравнения плоской задачи в полярных координатах: дифференциальные уравнения равновесия, уравнение неразрывности деформаций, формулы Коши и формулы обобщенного закона Гука, Вырежем из пластинки толщиной, равной единице, элемент abcd (рис. 32). Для этого проведем радиус Oab под произвольным углом q к начальному радиус-вектору, затем дадим углу бесконечно малое приращение dq и проведем радиус Odc. Произвольным радиусом q = r проведем дугу ad, затем дадим радиусу r приращение ab = dr и проведем вторую дугу — bc. Стороны полученного элемента имеют следующие размеры:
На границах элемента действуют следующие составляющие напряжений: sr — радиальное нормальное напряжение; sq — тангенциальное нормальное напряжение; tqr = trq — касательные напряжения; R и Q — составляющие объемной силы. |
Последнее изменение этой страницы: 2017-05-06; Просмотров: 934; Нарушение авторского права страницы
 , (1.27)
, (1.27) —шаровой тензор, соответствующий среднему давлению в точке, а
—шаровой тензор, соответствующий среднему давлению в точке, а (1.28)
(1.28) (1.29)
(1.29) (1.30)
(1.30) (1.31)
(1.31)




 . (2.5)
. (2.5) . (2.6)
. (2.6) .(2.7)
.(2.7) .
. (2.8)
(2.8)
 (2.9)
(2.9) , следовательно,
, следовательно, 
 (2.10)
(2.10) (2.11)
(2.11)
 (2.12)
(2.12) (2.13)
(2.13) — шаровой тензор, соответствующий объемному расширению, а девиатор деформации
— шаровой тензор, соответствующий объемному расширению, а девиатор деформации
 (2.14)
(2.14) (2.15)
(2.15)




 (в)
(в) (г)
(г)
 (а)
(а)
 (б)
(б)
 (6.1).
(6.1). Подставляя это соотношение в первые две формулы (4.5), находим
Подставляя это соотношение в первые две формулы (4.5), находим




 , также является функцией только двух координат:
, также является функцией только двух координат: 

 , то из условий на поверхности (4.2) остаются также только два;
, то из условий на поверхности (4.2) остаются также только два; 





 , (5.1)
, (5.1) , (5.2)
, (5.2) , (5.3)
, (5.3)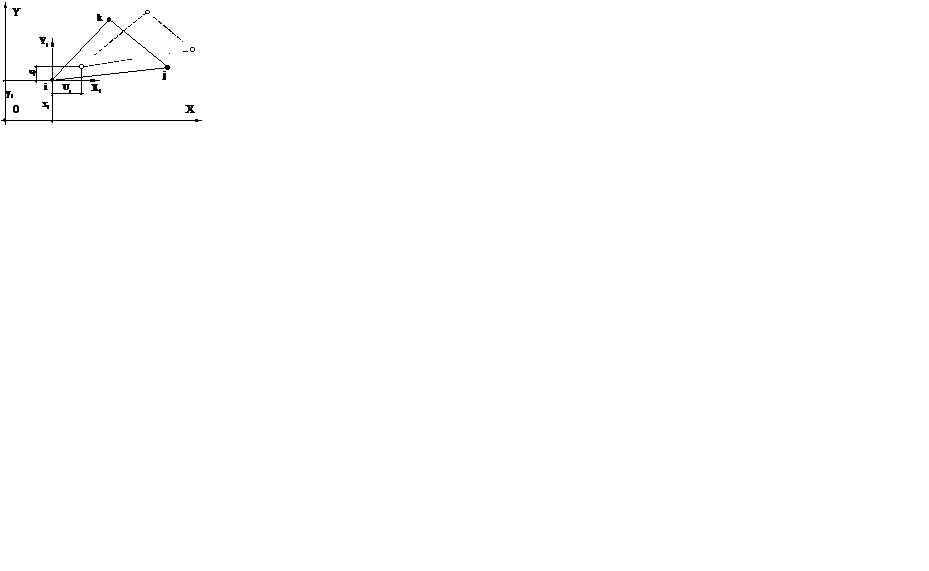
 , (5.4)
, (5.4)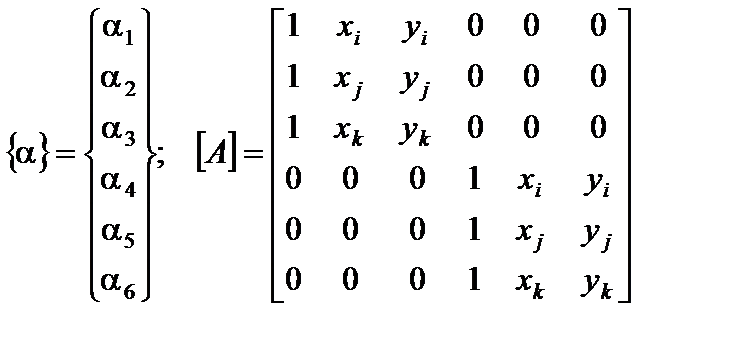 . (5.5)
. (5.5) , (5.6)
, (5.6)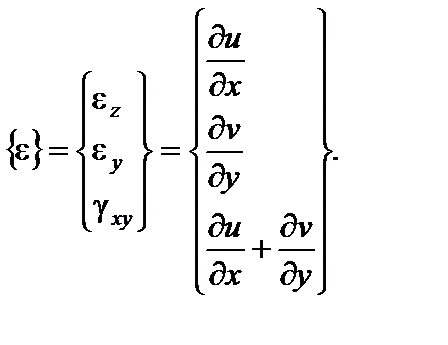 (5.7)
(5.7) (5.8)
(5.8) , (5.9)
, (5.9)
 (5.10)
(5.10)
 (5.11)
(5.11)
 (5.12)
(5.12) ;
;  ;
;  (5.13)
(5.13)
 (5.14)
(5.14) - элемент матрицы жесткости r-го элемента, характеризующий вклад j-го единичного перемещения в i-й компонентузловых сил; N - число конечных элементов в системе.
- элемент матрицы жесткости r-го элемента, характеризующий вклад j-го единичного перемещения в i-й компонентузловых сил; N - число конечных элементов в системе.


 (б)
(б) (в)
(в) (г)
(г) (д)
(д)
 (е)
(е) (ж)
(ж)
 (з)
(з) (и)
(и) (к]
(к] (л)
(л)
 Таким образом,
Таким образом, 

 для высоких балок-стенок при высоте h, имеющей порядок 2l, близки к единице, получаем:
для высоких балок-стенок при высоте h, имеющей порядок 2l, близки к единице, получаем: 
 (м)
(м)

