
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Составляющие перемещения и деформации. Зависимость между ними
Исследуем деформацию упругого тела. Для ее определения необходимо сравнить положение точек тела до и после приложения нагрузки. На рис. 10 показаны тело и точка А с координатами х, у, z. Под действием нагрузки точка А переместится в новое положение А' с координатами х', у', z', Вектор АA' называется вектором перемещения точки А.
Различают два вида перемещений: перемещение всего тела как единого целого без его деформирования и перемещение, связанное с деформированием тела. Перемещения первого вида изучаются в теоретической механике как перемещения абсолютно твердого тела. В теории упругости рассматриваются только перемещения, связанные с деформированием тела. Будем считать, что рассматриваемое тело закреплено так, чтобы оно не могло перемещаться как абсолютно твердое тело. Обозначим проекции вектора перемещения точки А на координатные оси через u, v, w, Они равны разности соответствующих координат точек А и А' и = х' - x; v = у' - у; w = z' - z и являются функциями координат; и = и (х, у, z); v = v (х, у, z)\ w = w (x, у, z). Разница в значениях перемещений различных точек тела вызывает его деформирование. Бесконечно малый параллелепипед с ребрами dx, dy, dz, вырезанный из упругого тела около произвольной точки.4, вследствие различных перемещений его точек деформируется таким образом, что изменяется длина его ребер и искажаются первоначально прямые углы между гранями.
Рис. 2.1
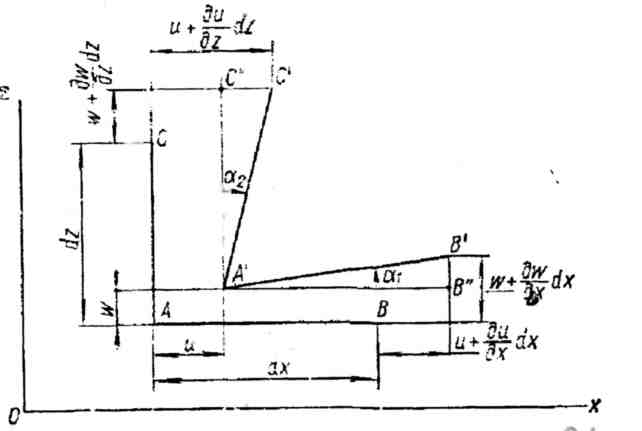
На рис. И изображены два ребра этого параллелепипеда: ребро АВ, параллельное оси х. и ребро АС, параллельное оси z. Длина ребра АВ равна dx, ребра АС — dz. После деформирования точки A, B и С займут новые положения: А', В', С'. При этом точка А получит перемещение, составляющие которого в плоскости чертежа равны и и w. Точка В, отстоящая от точки A на бесконечно малом расстоянии dx, получит перемещение, составляющие которого будут отличаться от составляющих перемещения точки А на бесконечно малую величину за счет изменения координаты х:
Составляющие перемещения точки С будут отличаться от составляющих перемещения точки А на бесконечно малую величину за счет изменения координаты z:
Длина проекции ребра ABна ось х после деформирования
Проекция абсолютного удлинения ребра А В на ось х
Относительное удлинение вдоль оси х
называется линейной деформацией по направлению оси х. Аналогично получим линейные деформации по направлениям координатных осей у и z:
Итак, линейная деформация по любому направлению равна частной производной составляющей перемещения в этом направлении по переменной в том же направлении. Рассмотрим изменения углов между ребрами параллелепипеда (рис. 11). Тангенс угла поворота ребра А В в плоскости xOz
Ограничиваясь рассмотрением только малых деформаций, можно положить tg a1» а1и пренебречь линейной деформацией ex ввиду малости по сравнению с единицей. Тогда
Аналогично находим угол поворота ребра АС в той же плоскости:
Угол сдвига в плоскости xOzy т. е. искажение прямого угла ВАС, называется угловой деформацией и определяется как сумма углов поворота ребер АВ и АС: gzx= а1+ а2=¶w/¶x+¶u/¶z.(а) Аналогично найдем угловые деформации в двух других координатных плоскостях: gxy=¶u/¶y - ¶v/¶x; gyz=¶v/¶z + ¶w/¶z.(б)
Итак, угловая деформация в любой плоскости равна сумме частных производных составляющих перемещения в этой плоскости по переменным в перпендикулярных направлениях. Формулы (а), (б), (в) и (г) дают шесть основных зависимостей составляющих линейных и угловых деформаций от составляющих пере метения:
Эти геометрические соотношения были выведены Коши и иногда называются уравнениями Коши. В пределе, когда длины ребер параллелепипеда стремятся к нулю, формулы (2.3) определяют линейные и угловые деформации в окрестности точки А. Правило знаков для составляющих деформации. 1. Положительным линейным деформациям отвечают удлинения по соответствующим направлениям, а отрицательным — укорочения. 2. Положительным угловым деформациям соответствует уменьшение углов между положительными направлениями координатных осей, а отрицательным — увеличение тех же углов. Объемная деформация В общем случае деформирования объем тела изменяется. Рассмотрим бесконечно малый параллелепипед объемом dV = dxdydz. С точностью до бесконечно малых величин высшего порядка можно считать, что изменение этого объема связано только с изменением длины ребер, но не с угловыми деформациями. Длина ребра АВ (см. рис.2.3), первоначально равная dx, после деформирования согласно формуле (2.1) составит dx1= dx (1 +ди/дх). Воспользовавшись первым уравнением (2.3), получим dx1= dx (1 + ex). (2.4) Аналогично вычисляются длины двух других ребер после деформирования:
Объем параллелепипеда после деформирования найдем как произведение новых длин ребер:
Раскрывая скобки, получаем
Пренебрегая в скобках величинами второго и третьего порядков малости и учитывая, что dxdydz = dV, находим
Тензор деформации Пусть при деформации среды точки последней получили смещение и, составляющие которого обозначим через их, иу, иz. Деформация среды характеризуется симметричным тензором деформации
составляющие которого равны
Тензор деформации, как и всякий симметричный тензор, приводится к главным осям:
причем e1, e2, e3 называются главными удлинениями. Это означает, что всякая деформация может быть осуществлена простыми растяжениями в трех взаимно перпендикулярных направлениях (главных направлениях). Разности
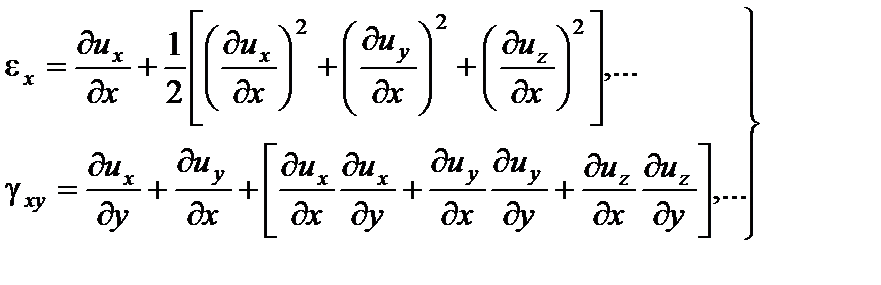
называются главными сдвигами. Наибольший по величине сдвиг в данной точке будем называть максимальным сдвигом gmax. 2. Малая деформация. В случае малой деформации компоненты ex, ey, ..., gхz малы по сравнению с единицей; если, кроме того, достаточно малы углы поворота (анализ этого вопроса дан в курсе теории упругости В. В. Новожилова Г271), то в формулах (2.1) можно пренебрегать произведениями
Здесь ex, ey, ez представляют собой относительные удлинения соответственно в направлениях осей х, у, z, аgхy , gyz , gxz относительные сдвиги (gхy —изменение угла между осями х, у и т. д.); Относительное изменение объема равно
Эти геометрические соотношения были выведены Коши и называются уравнениями Коши. Эти простые формулы непригодны, если необходимо описать значительные формоизменения массивных тел; тогда компоненты деформации сравнимы по величине с единицей, и нужно исходить из общих зависимостей (2.8). Подчеркнем также, что даже при малых удлинениях и сдвигах линейные соотношения (2.9) часто оказываются недостаточными в вопросах деформации и устойчивости гибких тел (стержни, пластины, оболочки) вследствие того, что элементы тела испытывают значительные перемещения и повороты. В дальнейшем, говоря о малой деформации, мы будем подразумевать такую деформацию, когда формулы (2.9) применимы. Ниже нередко используются тензорные обозначения компонент деформации
где xi — декартовы координаты, иi составляющие вектора перемещения. Легко видеть, что 3. Инварианты. Инварианты тензора деформации образуются так же, как для тензора напряжения, и в главных осях имеют вид:
Удобно пользоваться представлением тензора деформации в виде суммы
где
характеризует изменение формы элемента среды, обусловливаемое сдвигами. Инварианты девиатора деформации равны
В теории пластичности важную роль играет квадратичный инвариант I2 (De), который можно рассматривать как суммарную характеристику искажения формы элемента среды. Неотрицательная величина
называется интенсивностью деформаций сдвига [2] ). В случае чистого сдвига
Внося эти значения в (2.1), находим:
Численный множитель перед корнем в (2.9) выбран так, чтобы при чистом сдвиге интенсивность r равнялась величине сдвига у. |
Последнее изменение этой страницы: 2017-05-06; Просмотров: 1318; Нарушение авторского права страницы


 (2.1)
(2.1)
 (а)
(а) (б)
(б)
 (2.2)
(2.2) (2.3)
(2.3) . (2.5)
. (2.5) . (2.6)
. (2.6) .(2.7)
.(2.7) .
. (2.8)
(2.8)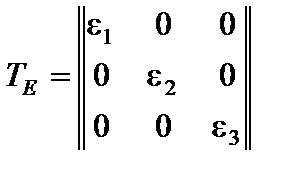
 (2.9)
(2.9) , следовательно,
, следовательно, 
 (2.10)
(2.10)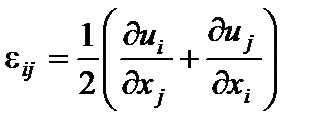 (2.11)
(2.11)
 (2.12)
(2.12) (2.13)
(2.13) — шаровой тензор, соответствующий объемному расширению, а девиатор деформации
— шаровой тензор, соответствующий объемному расширению, а девиатор деформации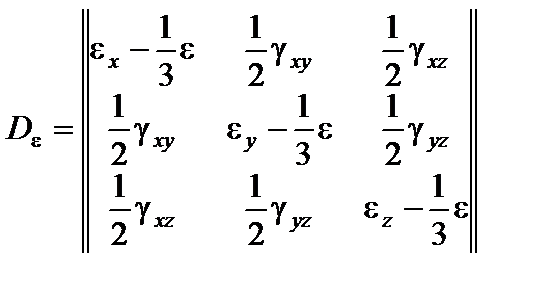
 (2.14)
(2.14) (2.15)
(2.15)
