
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Обоснование принципа Сен-Венана
Принцип Сен-Венана сформулирован в § 1 гл. I. Он использован при рассмотрении граничных условий в задаче об изгибе консоли (см. 6.6 настоящей главы). В расчете балки на двух опорах под действием равномерно распределенной нагрузки этот принцип применен для смягчения граничных условий (см. 6.6). Последняя задача позволяет дать количественную оценку принципу Сен-Венана. Из формул (6.25) следует, что на торцах рассмотренной балки, т. е. при х = ±l (см. рис. 22), возникают нормальные напряжения
Эпюра этих напряжений на правом торце показана на рис. 30. Максимальное значение достигается при у = h/2:
Рис. 30
Рис. 31 Влияние подсчитанных напряжений на напряжения max sx в различных поперечных сечениях балки иллюстрирует табл. 1. Из нее видно, что это влияние по мере удаления от торца очень быстро угасает. Так, в сечении на расстоянии от торца, равном высоте балки, напряжения Кроме указанных примеров для обоснования принципа Сен-Венана можно привести еще решение для узкой прямоугольной пластинки, сжимаемой по коротким сторонам силами Р. На рис» 31 показаны эпюры напряжений sy в трех поперечных сечениях. Сечения взяты на расстояниях от нагруженного конца, равных b/4, b/2 и b. Числа на эпюрах обозначают значения напряжений в долях от среднего напряжения sср =Р / b - l. Из рисунка видно, что по мере удаления от точки приложения силы эпюры быстро выравниваются и на расстоянии, рав ном ширине пластинки, распределение напряжений становится практически равномерным.
Сен-Венан сформулировал свой принцип для призмы сплошного сечения, нагруженной сжимающими силами по концам. В дальнейшем этот принцип был распространен на сплошное тело, в малой части которого действует нагрузка, прикладываемая различными способами. В тонкостенных стержнях и оболочках принцип Сен-Венана следует применять весьма осторожно, а именно только в том случае, когда область приложения нагрузки имеет порядок, соизмеримый с толщиной элементов сечения. ПЛОСКАЯ ЗАДАЧА ТЕОРИИ УПРУГОСТИ В ПОЛЯРНЫХ КООРДИНАТАХ Основные уравнения При решении плоской задачи встречаются тела, ограниченные поверхностями кругового цилиндра и радиально расходящимися плоскостями. В этих случаях переход от декартовой системы координат к полярной значительно упрощает решение.
В полярной системе координат положение любой точки на плоскости определяется двумя величинами: радиус-вектором r и полярным углом q, отсчитываемым от начального радиус-вектора r0. Рассмотрим основные уравнения плоской задачи в полярных координатах: дифференциальные уравнения равновесия, уравнение неразрывности деформаций, формулы Коши и формулы обобщенного закона Гука, Вырежем из пластинки толщиной, равной единице, элемент abcd (рис. 32). Для этого проведем радиус Oab под произвольным углом q к начальному радиус-вектору, затем дадим углу бесконечно малое приращение dq и проведем радиус Odc. Произвольным радиусом q = r проведем дугу ad, затем дадим радиусу r приращение ab = dr и проведем вторую дугу — bc. Стороны полученного элемента имеют следующие размеры:
На границах элемента действуют следующие составляющие напряжений: sr — радиальное нормальное напряжение; sq — тангенциальное нормальное напряжение; tqr = trq — касательные напряжения; R и Q — составляющие объемной силы.
Составим уравнения проекций всех сил на оси r и q:
При упрощении учтем, что ввиду малости угла dq можно принять
Тогда, отбрасывая величины третьего порядка малости и деля оба уравнения на площадь элемента dr • rdq, получаем дифференциальные уравнения равновесия для плоской задачи в полярной системе координат:
Особенностью этих уравнений по сравнению с условиями равновесия (5.2) для плоской задачи в декартовых координатах является наличие в знаменателе величины r. Чем ближе к началу координат (полюсу) расположена рассматриваемая точка, тем быстрее будут возрастать слагаемые, содержащие множитель 1/ r, так как r неограниченно убывает. Поэтому уравнения (7.1) неприемлемы для точек, лежащих вблизи полюса. Преобразуем к полярным координатам уравнение неразрывности деформаций. В декартовых координатах оно записывалось в виде (6.9)
Сумма нормальных напряжений по двум взаимно перпендикулярным площадкам в плоской задаче является инвариантом. Действительно, подставляя в первый инвариант напряженного состояния (1.12) sz = 0, получим, что при обобщенном плоском напряженном состоянии инвариантной величиной является
При плоской деформации согласно формуле (6.1) напряжение
и инвариантной величиной является
Таким образом, в плоской задаче в каждой точке сумма нормальных напряжений по двум взаимно перпендикулярным площадкам есть величина постоянная, и можно составить следующее тождество:
Заменяя с его помощью напряжения к формуле (а), получаем уравнение неразрывности деформаций для плоской задачи в полярной системе координат:
Однако оператор Лапласа в полярной системе имеет иной вид, чем в декартовой. Заменим в формуле (6.9) декартовы координаты на полярные, Для этого на рис. 32 ось х совместим с начальным радиус-вектором r0, а ось у направим вниз. В этом случае полярные координаты связаны с декартовыми следующими зависимостями;
Дифференцируя эти зависимости по х и у и учитывая, что х/r = = cos q, у/r = sin q, находим
Вычисляем первые производные по х и у произвольной функции y(r, q): используя выражения (в), получаем
Аналогично вычисляем вторые производные той же функции:
Совместим ось х с радиус-вектором r. В этом случае q = 0 и производные в декартовой системе координат (г) и (д) выразятся через производные в полярной системе следующим образом:
* Тогда оператор Лапласа принимает вид
Используя это выражение в уравнении (б), получим развернутое уравнение неразрывности деформаций для плоской задачи в полярной системе координат:
Выразим теперь в этой системе геометрические соотношения Коши. Обозначим составляющую перемещения вдоль оси r через u, а вдоль оси q — через v. На рис. 33 изображен элемент abcd до деформирования и положение точек а1, b1 и d1 после деформирования. Относительное удлинение в направлении r за счет перемещения и находим аналогично тому, как это сделано в декартовой системе координат (см. § 1 гл. II):
Относительное удлинение вдоль оси q зависит как от составляющей перемещения u, так и от составляющей v. В первом случае
во втором, по аналогии с формулой (з),
Рис. 33
Здесь элемент дуги ds заменен на произведение r¶q. Суммарное удлинение
Угловая деформация в рассматриваемой плоскости
Где Таким образом, геометрические соотношения Коши в полярной системе координат образуют систему уравнений (з), (и), (к):
Формулы закона Гука для обобщенного плоского напряженного состояния в полярных координатах сохраняют такой же вид, как ив декартовой системе [см. соотношения (6.8)], при замене индексов х и у на r и q:
В случае плоской деформации упругие постоянные E и n в формулах (7.5) должны быть заменены соответственно на упругие постоянные E1 и n1 согласно формулам (6.6). |
Последнее изменение этой страницы: 2017-05-06; Просмотров: 1209; Нарушение авторского права страницы



 составляют лишь 0, 74% от действующих в этом сечении максимальных напряжений sx.
составляют лишь 0, 74% от действующих в этом сечении максимальных напряжений sx.



 (7.1)
(7.1)
 (a)
(a)



 (б)
(б) (7-2)
(7-2) (в)
(в) (г)
(г) (д)
(д) (е)
(е) (ж)
(ж) (7.3)
(7.3) (з)
(з)


 (и)
(и)
 ;
;  ;
;  (к)
(к)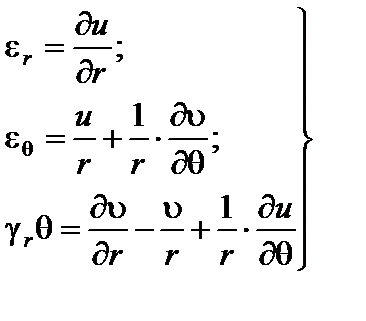 (7.4)
(7.4) (7.5)
(7.5)