|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Выбор и определение потребности в стеллажном оборудовании
Складские стеллажи позволяют использовать пространство склада с максимальной эффективностью. Допускают применение ручной, механизированной и смешанной погрузки. При определении вида стеллажей и их количества следует учитывать еще и планировку склада, объем грузооборота, число дней хранения груза на складе, вместимость одного стеллажа, вид погрузочно-разгрузочной и транспортирующей техники, размеры проходов и проездов. Определиться с типом стеллажей стоит еще на стадии про-ектирования и строительства склада. Возможно, предпочтительнее окажется не одна, а несколько конструкций различных типов, позволяющие использовать складские помещения максимально эффективно, не только для хранения продукции, но и осуществляя операции по комплектованию заказов и другие. При существующем огромном разнообразии товаров, сегодня разработан широкий набор комплексных решений для стеллажей, позволяющий обеспечить безопасное и эффективное складирование грузов любого размера и веса. Проектирование стеллажных систем должно вестись на основе индивидуального расчета каждого проекта, что позволяет оптимизировать требования к безопасности и стоимости конструкции. При этом учитываются нагрузки от веса груза, действия погрузочной техники, возможных дефектов стали и других факторов, которые подтверждаются предоставленными расчетами. Наиболее распространены складские системы для грузов на поддонах; складские системы для малогабаритных грузов; складские системы для специфических грузов. Методика расчета потребности склада в стеллажном обору- довании. Определение оптимальной длины и высоты стеллажной конструкции в рабочей зоне склада происходит с учетом: · длины и ширины рабочей зоны склада; · типа и размеров паллет, на которых размещаются коробки с грузом; · веса одной паллеты с грузом; · допустимой нагрузки на одну паллету и веса всего хранимого на складе груза; · необходимости увеличения жесткости стеллажных конструкций, что может повлечь за собой некоторое увеличение их размерных параметров. · величины проездов между стеллажными рядами определяется типом применяемого складского оборудования; · наличия или отсутствия окон; · доступности загрузки и выгрузки груза в стеллажные ячейки. Учет всех этих факторов позволит правильно рассчитать необходимое количество стеллажного оборудования для каждого вида выбранного склада. Количество стеллажей на складе определяется согласно формуле
Вместимость склада E = Fс qm, (3.20) Вместимость оборудования для хранения продукции (ячейки, стеллажи, штабеля и т. п.), т, вычисляется как где Vоб – геометрический объем соответствующего оборудования, м3; g – удельный вес материала или изделия, т/м3; b – коэффициент заполнения объема (плотность укладки). Завершая расчеты количества стеллажных конструкций следует определить, насколько эффективно используется складское пространство при применении конкретных видов складского оборудования. С этой целью требуется рассчитать коэффициент полезно используемой площади Этот параметр в зависимости от типа складского помещения, его планировки, используемого оборудования и других факторов может иметь значение от 0, 25 до 0, 6. Чем больше эти цифры, тем эффективнее используются складские площади. Эффективность использования вместимости склада можно определить путем расчета коэффициента использования по-лезного объема склада Kо. В зависимости от способа хранения товаров и характера груза этот показатель может принимать значения от 0, 3 до 0, 5 и вычисляется как отношение объема стеллажей и штабелей с товарами к общему складскому объему: Kо = Vпол /Vо.с. =Sпол hскл /(Sо.с. hо.с.), (3.23)
hо.с. – высота складского помещения, м. Вывод. Обоснование и выбор механического складского оборудования Задания: 1) Выбрать и обосновать выбор грузоподъемного складского оборудования; 2) Выбрать и обосновать выбор подъемно-транспортной техники; 3) Выбрать и обосновать выбор грузоподъемного складского оборудования; 4) Выполнить расчет механизма ручного привода; 5) Выполнить расчет электротали.
Информация. (Обращаем внимание, что при описании не стоит включать в пояснительную записку информацию обо всех возможных видах ГПО и ПТО, а выбирать только те, которые могут быть эффективно использованы на проектируемом складе). При выборе и обосновании выбора определенных типов складского механического оборудования следует принимать во внимание тип и назначение склада, его размеры, характер хранимых грузов, а также функциональное назначение оборудования, структуру его рабочего цикла, вид приводных устройств и направление перемещения грузов. Уровень технологии погрузочно-разгрузочных работ во многом зависит от структуры и эксплуатационных характеристик подъемно-транспортных машин и механизмов. Все подъемно-транспортное оборудованиеклассифициру-ется по следующим признакам. По функциональному назначению: грузоподъемное; транспортирующее; погрузочно-разгрузочное. По направлению перемещения грузов: для вертикального и сильнонаклонного перемещения; для горизонтального и сла-бонаклонного перемещения; для смешанного перемещения в вертикальном и в горизонтальном направлениях; для прост-ранственного перемещения по сложной траектории. По структуре рабочего цикла: – непрерывного действия; – периодического действия. По виду приводного устройства: – ручное; – электромеханическое; – гравитационное (перемещение груза под действием собст-венной тяжести). Для осуществления механизации и автоматизации погрузо-чно-разгрузочных работ в закрытых отапливаемых складах следует применять подъемно-транспортное оборудование с электроприводом: 1) краны мостовые электрические, в том числе с автома- тическими грузозахватными приспособлениями; 2) краны-штабеллеры мостовые опорные; 3) краны-штабеллеры стеллажные и трансманипуляторы, в том числе с системами автоматического управления (САУ); 4) электропогрузчики и электроштабеллеры; 5) электротележки; 6) электротягачи; 7) средства непрерывного транспорта (в том числе с САУ); 8) робокары; 9) манипуляторы сбалансированные. На открытых и полузакрытых складахцелесообразно использовать ПТО с двигателями внутреннего сгорания: 1) краны мостовые электрические с обогреваемыми ка- бинами; 2) краны козловые на железнодорожном ходу; 3) автопогрузчики; 4) автопогрузчики портальные. Первым этапом размещения грузов на складе является его разгрузка. Выбор типов погрузочно-разгрузочной техники определяется не только видом груза, предназначенного для хранения, но и той техникой, с помощью которой груз доаствляется к складу. Эти функции обычно выполняют железно-дорожные составы и автофургоны. Для выгрузки товаров из них применяют различные виды кранов, ручные тали и тельферы. 3.8.1.Обоснование выбора грузоподъемного (для каждого проектируемого склада - своего оборудования)
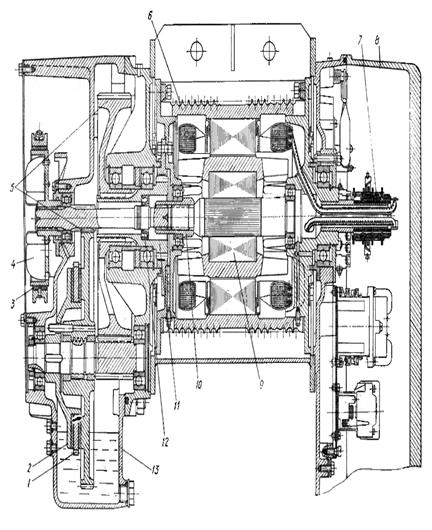
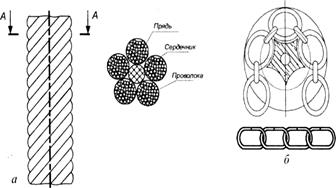
Место складов и логистической системе и его функции напрямую влияют на техническую оснащенность склада. Подъем груза, доставку на любые расстояния выполняют подъемно-транспортное оборудование (ПТО). Осуществление погрузочно-разгрузочных работ на оптовых базах, в хранилищах и складах является наиболее тяжелыми и трудоемкими [16]. Для обслуживания складов используют различные виды машин и механизмов: 1) подъемно-транспортные; 2) грузозахватные приспособления к подъемно-транспорт-ному оборудованию, в том числе полуавтоматические и автоматические; 3) средства малой механизации; Выбор их зависит от характеристик самих технических средств и общей направленности технической оснащенности склада. При этом высокий уровень механизации и автоматизации складских работ, а значит, использование высокопроизводительных технических средств целесообразны на крупных складах с большой складской площадью и устойчивым однородным материальным потоком. Создать систему комплексной механизации и автоматизации погрузочно-разгрузочных работ взамен малопривлекательного ручного труда в силу специфических особенностей отрасли не всегда представляется возможным и в большинстве случаев является экономически нецелесообразным Каждый тип грузоподъемной складской техники предназначен для определенных условий работы. Подъемно-транспортные машины и механизмы имеютобщие основные узлы и элементы, входящие в устройства: – цепи, канаты, тросы; – звездочки; – барабаны; –тормозные устройства и пр. а – канаты; б– цепи; Рисунок 3. 1 – Основные узлы ПТО.
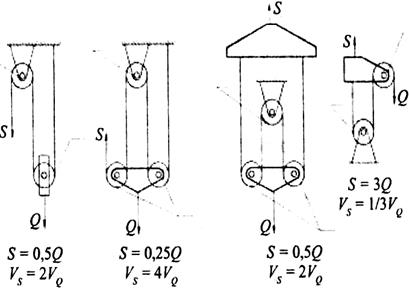
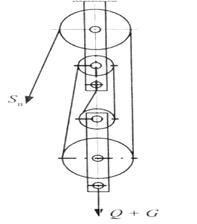
Цепи, используемые в подъемно-транспортном оборудовании, могут быть сварными или пластинчатыми. Сварные цепи изготавливаются из мягкой малоуглеродистой стали Ст2, СтЗ, Ст10 и состоят из одинаковых сварных овальных звеньев. Пластинчатые цепи изготавливаются из пластин высокоуглеродной стали Ст40, Ст45, Ст50, соединенных валиком. Число пластин в звене устанавливается в зависимости от предполагаемой величины нагрузки. Размеры звеньев и технические характеристики выполняются согласно принятым стандартам. Использование тех либо иных цепей в подъемно-транспортном оборудовании зависит от назначения механизмов и условий их эксплуатации. Звездочки преобразовывают вращательное движение в поступательное и изготавливаются литыми из чугуна либо штампованными из стали. Звенья сварной цепи укладываются в специальные гнезда звездочек. Зубья звездочек пластинчатых цепей входят в пространство между пластинами цепей, соприкасаясь с валиками шарниров. Канаты и тросы применяются в качестве гибких грузонесущих и тяговых органов машины. Наиболее широко используются стальные канаты (тросы). Их изготавливают из стальной или оцинкованной проволоки диаметром 0, 2-0, 3 мм с пределом прочности на растяжение, установленным нормативными документами. Из проволок свивают отдельные пряди, а из них — трос. Направление свивки может совпадать или быть противоположным, количество прядей в канате может быть разным. По центру располагается сердечник, в качестве которого используется пенька (для тросов, работающих в нормальных условиях), в отдельных случаях (для повышенных температур или химически агрессивной среды) — асбестовые или стальные сердечники. Барабан представляет собой полый цилиндр с гладкой или на резной поверхностью и предназначен для наматывания тросов или цепей, которые выполняются литыми из чугуна или стали и сварными. Различают барабаны для однослойной и многослойной навивок. При однослойной навивке поверхность барабана может быть гладкой, при многослойной — нарезной. Многослойная навивка увеличивает вместимость барабана без изменения его габаритов, но повышает износ троса вследствие сильного давления наружных его витков на внутренние. Трос прикрепляется к барабану хомутами и прижимами. Барабаны с одновременным наматыванием обеих ветвей троса имеют левую и правую винтовые нарезки. Поступательное движение осуществляется путем наматывания троса или цепи на вращающийся барабан. Блоки используются для изменения направления движения гибкого тягового органа (неподвижные блоки) или для обеспе-чения силы и скорости перемещения (подвижные блоки). Они имеют желобчатый обод, в котором свободно располагается трос (канат) или сварная цепь ( рис.3. 2). Рисунок 3. 2 – Разновидности блоков для тяговых органов ПТО Полиспасты – системы подвижных и неподвижных блоков, соединенных гибким элементом (см. рис. 3.3).
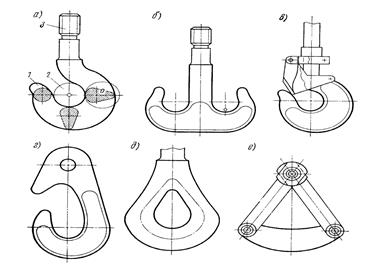
Остановы –это устройства, обеспечивающие возможность передачи вращения на валах приводов только в одном направлении. При снятии поднимающего усилия исключают самопроизвольное опускание груза под действием собственного веса. Тормозные устройства предназначены для фиксации положения груза в определенном положении. Позволяют удерживать груз в поднятом положении и регулируют скорость его опускания; также используются для остановки привода механизма. Тормоза создают дополнительное трение в приводах грузоподъемных устройств путем прижатия соединенной со станинной детали к поверхности тела. Остановы и тормозные устройства обеспечивают безопасность эксплуатации подъемно-транспортного оборудования Грузозахватывающие устройства устанавливаются в грузоподъемных машинах и предназначаются для захватывания грузов и их перемещения. Наибольшее распространение получили грузовые крюки и петли. Типы крюков и их размеры зависят от величины грузов и выбираются согласно установленным стандартам. Грузовые крюки изготавливают ковкой или штамповкой из стали. Крюк имеет рог 1 круглого сечения, переходящее в трапецеидальное, и хвостовик 3 (рис. 3.4, а). Свободное пространство называется зевом 2. В ряде случаев применяются двурогие крюки (рис. 3.4, б). Грузовые крюки могут снабжаться предохранительным замком (рис. 3.4, в). Он предотвращает самопроизвольное выпадение грузозахватного приспособления, навешиваемого на крюк. Замок представляет собой металлическую планку, поджимаемую пружиной, которая перекрывает зев крюка. Для портовых и судовых кранов выпускаются крюки с предохранительным пальцем, который нависает над рогом, а последний загнут внутрь зева (рис.3.4, г).Если крюк встретит какое-либо препятствие при подъеме груза, то рогом он не зацепится, так как по пальцу соскользнет с него и, хотя отклонится от вертикали, грузозахватное приспособление не выпадает из зева благодаря указанной форме рога.
Рисунок 3.4– Грузовые крюки и петли а – крюк однорогий; б – крюк двурогий; в – крюк с предохранительным замком; г – крюк с предохранительным пальцем; д – петля грузовая цельнокованая; е – петля грузовая составная
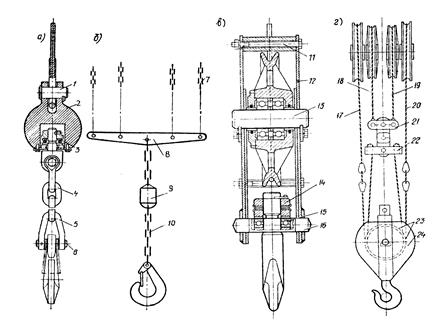
В кранах большой грузоподъемности вместо крюков применяют грузовые петли. В отличие от крюков они представляют собой двухопорную балку. Поэтому их размеры и масса становятся меньше по сравнению с крюками такой же грузоподъемности. Петли различают цельнокованые (рис.3.4, д) и составные (рис. 3.4, е), т.е. состоящие из отдельных элементов, шарнирно связанных между собой пальцами. Однако петли обладают тем недостатком, что в них неудобно заводить стропы и это несколько удлиняет цикл работы. Хвостовики крюков выполнены в виде ушка, или цилиндрическими с нарезанной резьбой. Выбор крюка с тем или иным видом хвостовика зависит от способа подвешивания груза к барабану. Грузовые петли одной с крюками грузоподъемности имеют меньшую массу, но менее удобны в эксплуатации. Они могут быть цельноковаными и составными. Размеры и формы петель не стандартизированы. При подвесе груза на одном канате или нескольких, закрепленных на общей траверсе, применяют крюки с хвостовиком в виде ушка. В первом случае в проушине утяжелителя 2 закреплен палец 1 (рис. 3.5, а). Канат обводят вокруг него. Конец каната скрепляют с основной ветвью различными способами. Образующаяся вокруг пальца петля каната должна быть обведена вокруг коуша. Он представляет собой металлическую пластину, выгнутую по форме петли и диаметру каната.
Рисунок 3.5– Способы подвеса груза а – через палец в проушине; б – через траверсу; в – через полиспаст; г – через блоки
Коуш придает канату плавный изгиб, а главное – предотвращает перетирание его о палец. Через ушко крюка пропущен палец 6 скобы 5, навешенной на отрезке сварной цепи 4. Цепь связана с вертлюгом, снабженным упорным подшипником 3. Вертлюг обеспечивает вращение каната относительно крюка, который остается неподвижным. Утяжелитель служит для свободного спуска порожнего крюка. Утяжелитель и вертлюг могут отсутствовать, в этом случае канат с коушем пропускают через ушко крюка. При подвесе груза на нескольких канатах (рис. 3.5, б), в данном случае на четырех, их концы закреплены на траверсе 8. Крюк с хвостовиком в виде ушка скрепляется со сварной цепью 10 аналогично предыдущему. Она имеет вертлюг 9. Роль утяжелителя выполняют отрезки сварных цепей 7, введенные в канат. При полиспастном подвесе груза (рис. 3.5, в) хвостовик крюка должен иметь резьбу, тогда крюк устанавливают в блочной подвеске. Она состоит из двух щек 12, скрепленных между собой связями 11. В щеках содержателями стопорится ось 13 подвижных блоков полиспаста. На нижние участки щек свободно опираются цапфы траверсы 16, которая имеет центральное отверстие. Через него пропускают хвостик крюка. При грузоподъемности более 3 т на хвостовик надевают упорный подшипник 15, а на резьбу навертывают гайку 14. Во избежание самоотвинчивания она фиксируется стопорной планкой или шплинтуется. Конструкция позволяет крюку качаться вместе с траверсой на ее цапфах и вращаться на подшипнике на 360°. Такая подвижность крюка удобна в работе при навешивании и снятии с него груза. При подвешивании груза на четырех канатах (рис.3.5, г) два из них 17 и 20 огибают уравнительный блок 23, концы их закреплены на нижней траверсе 22. Канаты 18 и 19 скреплены с верхней траверсой 21. Ели хвостик с резьбой, то крюк устанавливают в блочной обойме 24. Рассмотренная подвеска обеспечивает равномерное распределение нагрузки между всеми канатами. Кованый крюк и детали его крепления подлежат немедленной замене, если при осмотре будут обнаружены трещины, надрывы, если износ зева крюка превышает 5 % первоначальной высоты сечения и в местах перехода к шейке или деформированные нитки резьбы хвостовой части крюка или гайки. Разрешается зачистка местных пороков крюка без снижения его прочности, а заварка или заделка дефектов крюка не допускается. Пластинчатые крюки подлежат выбраковке, если обнаружены трещины в пластинах или ослабевшие заклепки. 3.8.2.Обоснование выбора подъемно-транспортного оборудования (для каждого проектируемого склада - своего оборудования) Подъемно-транспортное оборудование (ПТО) — машины и механизмы, предназначенные для подъема, удержания и перемещения груза в пространстве в пределах рабочей площадки. Грузоподъемными и подъемно-транспортнымимашинами и механизмами являются домкраты, лебедки, тали, краны, лифты, подъемники, промышленные роботы, манипуляторы и пр. Лебедка — подъемный механизм периодического действия, предназначенный для подъема грузов гибкими тяговыми органами. Используется самостоятельно или в составе сложных грузоподъемных машин. В качестве гибкого элемента, поднимающего груз, обычно используется канат, который наматывается на барабан. Для обеспечения безопасности лебедки снабжаются автоматически действующими тормозными устройствами. Различают лебедки с ручным и электрическим приводом. Ручная лебедкаприводится в движение вращением рукоятки. Совместно с тросом и грузозахватывающим устройством в состав ручной лебедки входят гладкий барабан, открытые зубчатые передачи, съемные рукоятки, останов и станина. При вращении рукоятки движение передается барабану посредством зубчатой передачи. Трос поднимает груз, наматываясь на барабан. Останов фиксирует положение груза. Электрические лебедкисостоят из укрепленных на раме электродвигателя, редуктора, вращающего барабан, и тормозного устройства. Принцип действия их аналогичен ручным лебедкам. Лифт — клеточный подъемный механизм для перемещения грузов с одного уровня на другой в кабине, движущейся в специальной шахте. Грузовой лифт предназначен для подъема и опускания грузов, затаренных в короба, ящики, мешки, кипы и т. п., на платформах или в кабинах. Конструкция лифта включает машинное отделение, располагаемое в верхней части шахты, отделение, в котором устанавливается грузовая лебедка, аппаратура управления и сигнализация, грузовую кабину (платформу) и противовес.
Электрогидравлический подъемный стол управляется с помощью переносного или стационарного кнопочного пунктаи предоставляет следующие варианты использования: – в качестве грузового сообщения между разными уровня ми складского помещения; – возможность погрузки и разгрузки транспорта, при отсутствии рампы; – возможность подъёма и опускания авто на многоярусных стоянках; – для комплектования заказов на европаллетах; – в автоматических линиях; – в промышленном оборудовании. Работа подъемного стола практически бесшумна, благодаря наличию гидронасоса. Предохранительные клапаны исключают возможность резкого опускания. Подъемный стол имеет ограждение и блокировку открывания дверей на верхнем и нижнем уровнях, что гарантирует большую безопасность. Используемое на складах грузоподъемное (ГПО) и подъемно-транспортное оборудование (ПТО) может иметь различные приводные устройства: – ручное (лебедки, ручные грузовые тележки); – электромеханическое (тельферы, транспортеры, лифты, подъемники, элеваторы, погрузчики, штабелеры); – действующее под воздействием собственного веса (ро-ликовые транспортеры, спуски). Наиболее распространенным в конструкциях таких механизмов является ручной и гидравлический приводы. Выводы.
3.8.3. Выбор талей и тельферов (конкретные виды для проектируемых складов) Таль – важнейший элемент при проведении строительных, монтажных, погрузочных и прочих работ. Это механизм периодического действия, смонтированный в одном корпусе с приводом, предназначенный либо только для подъема, либо для подъема и горизонтального перемещения груза. Тали могут использоваться даже при самых сложных условиях – низких температурах и на открытом пространстве. Различают тали ручные и электрические, стационарные и передвижные. Ручная — таль с ручным приводом механизмов, которая представляет собой грузоподъемное устройство, механизм которого смонтирован в специальной обойме, подвешиваемой на крюк. Гибким элементом, поднимающим груз, является цепь, перемещающая груз звездочкой, которая связана передаточным механизмом с тяговым колесом, вращающимся вручную или при помощи огибающей его замкнутой (бесконечной) сварочной цепи.
Рисунок 3.6 – Ручная таль Ручные талисостоят из цепного полиспаста, двухступенчатого соосного цилиндрического редуктора с механическим ручным приводом, на выходной вал которого устанавливается специальный дисковый тормоз. Достоинстваручных талей: · высокая ремонтопригодность; · надежность; · простота технического обслуживания; · продолжительный срок эксплуатации. Для разных условий работы предназначаются разные типы талей, чаще всего их различают по принципу управления и делят на ручные и электрические. Ручные (или механические) талине имеют электрического привода, однако могут выполнять работы, непосильные для электрических талей. Они могут поднимать тяжелые грузы, но при этом они отличаются простотой эксплуатации, надежностью и легкостью обслуживания, обеспечивают безопасность работников и сохранность груза. Кроме того, таль оснащается системой торможения груза, а также блочной подвеской с крюком. Различающиеся по типу привода ручные цепные тали могут быть рычажными, шестеренными, червячными. Тали с ручным приводом механизма передвижения тележки передвигаемые вручную зa счет горизонтальной силы, приложенной к подвешенному грузу, на практике называют кошками. Шестеренная таль состоит из корпуса с крюком 3, в котором размещены соосная планетарная зубчатая передача 4и ведущая звездочка тяговой цепи 5 (рис.3. 7, а). На приводном валу установлен грузоупорный тормоз 7 с собачкой 2, закрепленной на корпусе тали.
Рисунок 3.7 – Конструкция ручной тали
Привод тали осуществляют вращением тягового колеса 6 посредством бесконечной сварной круглозвенной калиброванной цепи 8. Для подъема груза предназначен двукратный полиспаст из пластинчатой грузовой шарнирной цепи 1 с крюковой подвеской 9. Червячная таль состоит из корпуса с крюком 5, в котором размещены червячная передача 4и ведущая звездочка 3грузовой цепи (рис.3, 7, б ). На приводном (червячном) валу установлен грузоупорный тормоз 2и закреплено тяговое колесо 6. Привод тали осуществляют вращением тягового колеса посредством бесконечной сварной круглозвенной калиброванной цепи 7, а подъем груза осуществляет двукратный полиспаст из пластинчатой грузовой шарнирной цепи с крюковой подвеской 8. Следует отметить, что применение грузовых цепей в талях обеспечивает уменьшение габаритов и масс последних. Необходимое рабочее усилие на цепи тягового класса, Н Fp = Gгр r/ R i a, η (3.24) где Grp — вес груза, Н; г —радиус ведущей звездочки, мм; R—радиус тягового колеса, мм; i — передаточное отношение червячной передачи; а — кратность полиспаста; η — к. п. д. передачи. Выбор конкретного вида тали или тельфера с созданием необходимых коммуникаций для ее работы определяется в процессе проектирования склада и должен соответствовать характеру складируемого груза. Ниже приведены основные виды существующих механизмов и отмечены их достоинства и недостатки, определяющие эффективность их применения в различных складских хозяйствах.
Червячные тали в качестве редуктора используют червячную передачу.
Цепные тали имеют грузоподъемность до 10 т, высоту подъема до 6 м, поэтому чаще всего применяются для перемещения различных тяжелых товаров, подъема и укладки товаров в ячейки и на полки. Обыкновенно ручная цепная таль используется, когда применение электроталей затруднено либо нерационально – например, при низкой интенсивности работ, при небольших объемах, при отсутствии электроснабжения и т.д. Также ввиду небольшого веса и достаточно компактных габаритов тали используются в ограниченных по площади пространствах и помещениях, где невозможна или затруднена работа других агрегатов и грузоподъемных кранов. Важно: все виды талей не могут применяться для подъема людей, взрывоопасных и ядовитых веществ, жидких и раскаленных металлов. Электрическая — таль с электроприводом ее механизмов. Электротали оснащают преимущественно канатным гибким органом, а ручные, наоборот, цепным. Электрические талипредназначены для выполнения погру-зочно-разгрузочных и транспортных операций. Они переме-щаются по нижней полке двутаврового монорельса. Электротали выпускают грузоподъемностью 0, 25; 0, 5; 1; 2; 3, 2; 5 тс. Электроталь грузоподъемностью 0, 25 тс передвижная, имеет две неприводные двухколесные тележки; барабан ненарезной с трехслойной навивкой каната, один дисковый электромагнитный тормоз и ограничитель подъема крюка. Электрические тали грузоподъемностью 1; 2 и 3, 2 тс по конструкции аналогичны. Имеют механизм подъема с электродвигателем, встроенным в нарезной барабан, два тормоза – один дисковый грузоупорный, другой – колодочный электромагнитный и ограничители подъема и спуска крюка; механизм передвижения с двумя двухколесными шарнирными тележками, из которых одна приводная. Электрические тали грузоподъемностью 5 тс отличаются от рассмотренных в основном тем, что имеют две приводные четырехколесные тележки. Конструкция механизма подъема груза электроталей грузоподъемностью 1; 2; 3, 2 и 5 тс представлена на рис. 3.8.
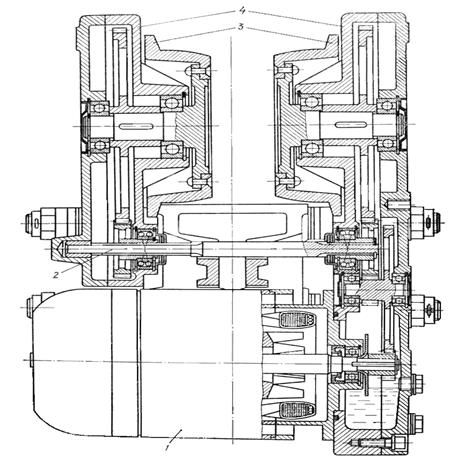
Рисунок 3.8 – Конструкция механизма подъема Электротали В нарезной барабан 6 встроен электродвигатель 9, к которому ток подводится щетками через кольцевой токосъемник 7. Редуктор 13двухступенчатый, имеет две пары прямозубых цилиндрических колес 5 и получает вращение от электродвигателя при помощи шлицевого соединения 10. Вал проходит через полую зубчатую муфту 11, соединяющую выходную шестерню редуктора с барабаном. Полость редуктора отделяется от мотор-барабана резиновым манжетным уплотнением 12. Смазываются зубчатые передачи разбрызгиванием масла при погружении зубчатого колеса, соединенного с быстро-ходной шестерней, в масляную ванну. Нормально замкнутый колодочный тормоз 3 с длинноходовым электромагнитом является стопорным, отрегулированным на тормозной момент с требуемым запасом торможения. Тормозной шкив установлен на консольной части быстроходного вала редуктора. Редуктор обдувается воздушным потоком, создаваемым центробежным вентилятором 4, крыльчатка которого прикреплена к тормозному шкиву. Вторым тормозом механизма подъема является грузоупорный тормоз с тормозными дисками 2 и храповиком 1‚ установленный на промежуточном валу редуктора и погруженный частично в масляную ванну. Диски изготовлены из фрикционных материалов, обеспечивающих длительную работу в масле. Этот тормоз плавно спускает груз примерно со скоростью, равной скорости подъема, а также снижает динамические нагрузки при остановке механизма подъема с грузомС другой, торцовой стороны барабана расположен шкаф 8 с электроаппаратурой, являющийся противовесом для редуктора. Здесь размещены пускатели механизмов передвижения и подъема, конечные выключатели подъема и спуска крюка. Приводная шарнирная тележка электроталей грузоподъемностью 0, 5; 1; 2; 3, 2 тс показана на рис. 3.9. Она состоит из двух приводных колес 3, получающих вращение от электродвигателя 1 через цилиндрические зубчатые передачи двух вертикальных щекообразных редукторов 4. Один из редукторов приводится во вращение от трансмиссионного валика 2.
Рисунок 3.9 – Приводная шарнирная тележка Электроталей
Выводы. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 4572; Нарушение авторского права страницы


 Ручная шестеренная
стационарная таль
Ручная шестеренная
стационарная таль
 Ручная шестеренная
передвижная таль
Ручная шестеренная
передвижная таль
 Шестеренные рычажные стационарные тали
Шестеренные рычажные стационарные тали
 Ручные червячные стационарные тали
Ручные червячные стационарные тали
 Ручные червячные
передвижные тали
Ручные червячные
передвижные тали