|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Контейнерный грузоподъемностью 5 т
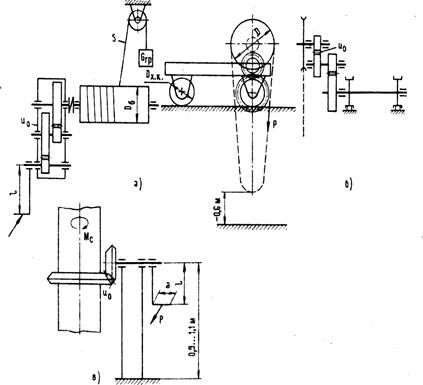
Контейнерные краны устанавливают иногда на палубе судна. Грузозахватным органом контейнерных кранов являются автоматические захваты – спредеры. Козловые контейнерные краны грузоподъемностью 20 т и 32 т регламентированы ГОСТ 24390-80. Примеры расчетов 1)Пример расчета механизма ручного привода. Ручной привод применяют в простейших машинах малой грузоподъемности, работающих с малыми скоростями движения в ненапряженном режиме, а также в механизмах вспомогательного назначения [18]. В механизмах с ручным приводом в качестве приводного элемента используют рукоятки, а в случае, когда механизм расположен на некоторой высоте, — тяговые колеса, представляющие цепной блок, охватываемый сварной калиброванной цепью. На рис.3.17 представлены схемы механизмов с ручным приводом. Механизм подъема состоит из барабана, на который наматывается канат с подвешенным к нему грузом весом Grp, редуктора с общим передаточным числом, равным и0 = и1и2, и приводного элемента — рукоятки или тягового колеса, к которым прикладывает усилие Рр рабочий. На валу с одной рукояткой могут одновременно работать один или два рабочих; на валу с двумя pyкоятками — два или четыре; на цепи тягового колеса — не более трех.
Рисунок 3.17 – Схемы механизмов с ручным приводом При радиусе рукоятки (приводного колеса), равном l, и усилии одного рабочего Рр момент на валу рукоятки (приводного колеса) Мр =Ψ m Рр l, (3.25) где m — число рабочих; Ψ — коэффициент, учитывающий неодновременность приложения усилия при совместной работе нескольких рабочих ( Ψ = 0, 8 — для двух, Ψ = 0, 75 — для трех и Ψ = 0, 7 — для четырех). Момент сопротивления на валу барабана от веса груза Мс = SD6/2, (3.26) где D6 — диаметр барабана; S - натяжение тягового органа на барабане. При расчете ручного привода механизма передвижения момент сопротивления на валу ходовых колес Мс = WcDx x/2, (3.27) где Wc — сопротивление передвижению, Dx к диаметр хо-дового колеса. Для механизма поворота Мс = Σ Мсi (3.28) где MCj — моменты сопротивления крана относительно оси вращения поворотной части крана от вертикальных и горизон тальных реакций в опорах. Необходимое передаточное число механизма между вход-ным и выходным валами лебедки Uо = Мс/Мр η (3.29) где η - КПД передачи. Инерционные нагрузки при расчете ручного привода обычно не учитывают следствие их незначительности. В зависимости от продолжительности работы усилие Рр и окружная скорость рукоятки и тяговых колес изменяются. Средние значения усилия и окружной скорости приведены в таблице 3.7. Усилие рабочего, прикладываемое непосредственно к тележке для ее передвижения, принимают равным 80, 120 и 200 Н при соответствующей продолжительности работы 15, 10 и 5 мин. Наибольшее возможное усилие при трогании механизма с места не превышает 500 Н. Усилие рабочего на рычаге управления при редкой работе не должно превышать 400 Н. Плечо (радиус) вращения рукояток должно быть не более 400 мм. Ось вращения рукоятки располагают обычно на высоте 900 -1100 мм от уровня пола. Таблица 3.8.1 – Средние значения усилия и окружной скорости
Если приводной вал располагают на значительной высоте, то используют тяговые колеса, приводимые во вращение бесконечной цепью такой длины, что нижняя часть ее петли находится на высоте примерно 0, 6 м от опорной поверхности, на которой рабочий управляет машиной (рис. 3.7). В качестве тяговой цепи обычно используют сварную цепь, изготовленную из прутка диаметром 5 – 6 мм. Диаметр D тягового колеса принимают 300 – 1000 мм. Тяговое колесо имеет направляющие для предотвращения спадания цепи. Длину ручки рукоятки а принимают 300 – 350 мм при работе одного рабочего и 450– 500 мм при совместной работе двух рабочих. Скорость подъема груза в механизме подъема с ручным приводом, исходя из равенства работ, совершаемых рабочим и весом груза, vrp = mPpvp Ψ η /Grр, (3.30)
где vp — окружная скорость приводной рукоятки или тягового колеса. Плечо приводных рукояток домкратов составляет 200–250 мм при высоте вращения их от опорной поверхности домкрата примерно 500 мм. При качающейся рукоятке домкрата длину рукоятки принимают не более 800 мм. Две рукоятки на одном валу располагают под углом 120° или 90° друг относительно друга. При расчете на прочность рукояток, педалей и элементов ручного управления возможное прилагаемое усилие принимают равным номинальному весу рабочего - 800 Н. При ручном механизме с тяговой цепью это расчетное усилие составляет 1200 Н. На рис. 3.18 на примере механизмов подъема грузов и их передвижения представлены два различных режима работы механизмов: двигательный режим работы (РР), когда двигатель преодолевает момент сил сопротивления Мс и крутящий момент на валу ротора Мдв. направлен в сторону его вращения n, например при подъеме груза (стрелы), передвижении и повороте крана. В этом случае крутящий момент ротора двигателя положителен, а момент сил сопротивления—отрица-телен. В случае ограничения скорости опускания тяжелого груза (рис. 3.18, б), наличия попутного ветра или уклона, помогающих передвижению (повороту) крана (рис. 3.18, г), когда двигатель противодействует движению, момент ротора двигателя МАВ становится отрицательным, а момент сил сопротивления Мс — положительным. Такой РР электродвигателя, при котором крутящий момент на валу ротора противоположен направлению его вращения, называют тормозным.
Рисунок 3.18 – Режимы работы электродвигателей механизмов подъема грузов (а, в, д) и передвижения крана (б, г) а, б – двигательный, в, г – тормозной, д– силовой
При опускании небольшого по массе груза, сила тяжести которого не может преодолеть момент сил сопротивления Мс, двигатель развивает положительный крутящий момент Мдв, направленный в сторону движения груза (рис.3.18, д). Такое опускание груза называют силовым. Обеспечение заданного режима работы электроприводов в электрическом подъемно-транспортном оборудовании осуществляется с помощьюспециальных электрических аппаратов, к которым относятся рубильники, пакетные переключатели, командоаппараты (контроллеры, кнопки, ключи) и пр. 2) Пример расчета электротали.
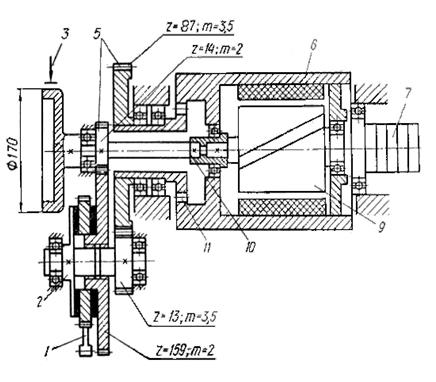
Выполним расчет механизма подъема электротали при следующих исходных данных: грузоподъемность электротали Q = 3, 2 тс, высота подъема Н = 6 м; скорость подъема груза v = 0, 134 м/с, режим работы механизмов средний [19, 20, 22, 23]. Кинематическая схема механизма подъема представлена на рисунке 3.19. Для электротали грузоподъемностью 3, 2 тс принимаем одинарный полиспаст кратностью u = 2 и крюковую подвеску с блоком на подшипниках качения.
Рисунок 3.19 – Кинематическая схема Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1949; Нарушение авторского права страницы