|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Виды технологических процессов
В зависимости от применения в производственном процессе для решения одной и той же задачи различных приемов и оборудования различают следующие виды технологических процессов. · Единичный технологический процесс (ЕТП). Разрабатывается индивидуально для конкретной детали. · Типовой технологический процесс (ТТП). Создается для группы изделий, обладающих общностью конструктивных признаков. Разработку типовых технологических процессов осуществляют на общегосударственном и отраслевом уровнях, а также на уровне предприятия в соответствии с общими правилами разработки технологических процессов. · Групповой технологический процесс (ГТП). В промышленности и сельском хозяйстве описание технологического процесса выполняется в документе, именуемом операционной картой технологического процесса (при подробном описании) или маршрутной картой (при кратком описании). · Маршрутная карта — описание маршрутов движения по цеху изготовляемой детали. · Операционная карта — перечень переходов, установок и применяемых инструментов. · Технологическая карта — документ, в котором описан процесс обработки деталей, материалов, конструкторская документация, технологическая оснастка. Для автоматизации технологических процессов, агрегатов, аппаратов или устройств необходимо разработать системы автоматического управления (САУ) требуемого качества. В свою очередь, разработка САУ требуемого качества возможна лишь на базе математической модели объекта управления с применением методов теории автоматического управления (ТАУ). ТАУ как наука была сформирована лишь в 40-х годах ХХ века. Отдельные разделы ТАУ, такие как теория устойчивости технических систем и качество регулирования отдельных параметров технологических процессов, были разработаны во многих странах еще в середине ХIХ века. Первые автоматы использовались человеком на заре своего существования. Например, капкан для охоты на диких животных является механическим самодействующим устройством и может быть отнесен к классу автоматов. Автоматы в начальной производственной деятельности человека применялись при переработке добытых плодов природы, например при стабилизации скорости вращения мельничных колес. Из-за колебаний уровня в реке количество падающей на мельничное колесо воды изменялось, что приводило к нежелательной неравномерности скорости вращения колеса. Для того чтобы стабилизировать скорость вращения колеса, на водоводных лотках устанавливали заслонки, соединенные с поплавками. При подъеме уровня воды в реке поплавки всплывали и прикрывали заслонки, которые ограничивали поток воды, падающей на мельничное колесо, и скорость вращения колеса практически не изменялась. В данном случае применен принцип отрицательной обратной связи, которая компенсирует возникающие в процессе нормальной работы мельницы нежелательные возмущающие воздействия. Этот принцип используется во всех современных системах управления и обеспечивает успех функционирования автомата без непосредственного участия человека в его нормальной работе. В настоящее время теория автоматического управления (ТАУ) представляет собой раздел технической кибернетики, которая входит в состав обобщающей науки кибернетики. Как самостоятельная наука кибернетика была сформулирована в 1948 году Нобертом Винером в книге Кибернетика, или управление и связь в животном и машине. — 2-е издание. — М.: Наука, 1983. Задачами ТАУ являются анализ и синтез систем автоматического управления (САУ) с заданными пользователем свойствами. К основным понятиям ТАУ относятся: «система», «объект управления», «управляющее устройство», «закон управления». Под системой управления в ТАУ понимают совокупность объекта управления и управляющего устройства, взаимодействующих между собой для достижения поставленной проектировщиком цели. Объект управления — это элемент системы управления, на который оказывается управляющее воздействие. В качестве объекта в САУ может быть машина, технологический процесс, производственный комплекс и т.п. Управляющее устройство — это элемент САУ, который на основе анализа складывающейся ситуации и желательного ее состояния формирует закон управления и осуществляет управляющее воздействие. В качестве управляющего устройства может служить реле, электронный усилитель, вычислительное устройство или ЭВМ. Закон управления — это алгоритм, характеризующий последовательность целесообразных управляющих воздействий на объект управления. Под управляющим воздействием понимают целесообразную подачу на объект управления информации, энергии или вещества. Функциональная схема САУ представлена на рис. 1.1.
Рис. 1.1. Функциональная схема системы автоматического управления: 1 — управляемая часть САУ; 2 — управляющая часть САУ; X — физическая величина, характеризующая состояние ОУ; XS — сигнал, пропорциональный состоянию ОУ; Xi сигнал оценки состояния ОУ; Xg — сигнал желаемого состояния ОУ; dх = Xg — Xi — разность сигналов, пропорциональных желаемому и действительному состояниям ОУ (рассогласование); Uz — сигнал, пропорциональный закону управления; N — усиленный сигнал закона управления; U — управляемый поток информации, энергии или вещества к ОУ В процессе нормального функционирования САУ ее элементы должны выполнять следующие функции: 1) ОУ — объект управления преобразует поступающий на его вход поток информации, энергии или вещества в изменение своего состояния, которое характеризуется одним или несколькими физическими величинами; 2) Д — датчик преобразует физическую величину, характеризующую состояние объекта управления, в сигнал, удобный для дальнейшего использования; 3) З — задатчик генерирует сигнал, пропорциональный желаемому состоянию объекта управления; 4) И — измеритель осуществляет сравнение сигнала о действительном состоянии объекта управления с принятой для этого единицей измерения. Этот элемент необходим только для контроля работы системы и непосредственно в процессе управления не участвует; 5) ЭС — элемент сравнения производит алгебраическое сложение сигналов о действительном и желаемом состояниях объекта управления; 6) УУ — управляющее устройство формирует сигнал, отображающий закон управления; 7) ИМ — исполнительный механизм усиливает сигнал о законе управления до величины, достаточной для воздействия на поток информации, энергии или вещества к объекту управления; 8) РО — регулирующий орган изменяет поток информации, энергии или вещества к объекту управления в соответствии с законом управления. Перечисленные функции САУ могут реализоваться на базе серийно выпускаемых технических устройств. Например, САУ температуры нагревателя (рис. 1.2).
Рис. 1.2. Пример реальной САУ температуры: Р — реостат; УС — усилитель; РЭ — релейный элемент; КР — контакты релейного элемента; Нагр — нагреватель; ТР — терморезистор; (dХ) — мостовая схема сравнения сопротивлений задающего реостата и терморезистора — датчика температуры; tg — сопротивление реостата; ts — сопротивление терморезистора; t — температура нагревателя; dx — разность сопротивлений Р и ТР; Uz — напряжение, пропорциональное разности сопротивлений; N — усилие, развиваемое катушкой релейного элемента; U — напряжение, подаваемое на нагреватель для увеличения его температуры Лекция № 2 Классификация САУ. Примеры реальных САУ Все разнообразие систем автоматического управления можно отнести к нескольким группам в соответствии с их отличительными особенностями. В каждом конкретном случае с учетом особенностей объекта управления подбирается система управления из множества разновидностей систем, показанных на рис. 2.1. . Рис. 2.1. Классификация систем автоматического управления Сокращения: с модул.сигн. – с модулированным сигналом; нестационарн. – нестационарные; с распр. пар. – с распределёнными параметрами. Разомкнутые системы не имеют обратной связи и используются в тех случаях, когда помехи работе системы пренебрежимо малы. Замкнутые системы имеют обратную связь и обеспечивают более точное выполнение поставленных перед ними задач в условиях существенных возмущающих воздействий. Комбинированные системы формируют свое управляющее воздействие с учетом сигналов обратной связи и информации о возмущающих воздействиях, что позволяет более эффективно решать поставленные перед ними задачиСистемы стабилизации применяют для поддержания управляемых параметров технологического процесса постоянными во времени. Системы программного управления используют для изменения управляемых параметров технологического процесса по заданному во времени или пространстве закону (программе). Следящие системы служат для отображения отслеживаемых параметров технологического процесса, изменяющихся по неизвестному заранее закону. Настраиваемые системы настраиваются перед их включением в нормальную работу и не изменяют алгоритма своего функционирования и характеристик до возникновения неисправности или осуществления настройки. Адаптивные (самонастраивающиеся) системы обладают способностью изменять свои характеристики или алгоритм функционирования в зависимости от условий функционирования с целью улучшения качества управления. Игровые системы сами строят свою стратегию поведения в зависимости от собственной цели и поведения противодействующей системы (стороны). Стационарные системы не изменяют своих характеристик в процессе нормального функционирования. Нестационарные системы включают в свой состав хотя бы один элемент, характеристики которого изменяются во времени. Системы с распределенными параметрами включают в свой состав хотя бы один элемент, характеристики которого зависят от пространственных координат. Системы непрерывного действия характеризуются тем, что информация в контуре управления циркулирует непрерывно во времени. В системах с гармоническим модулированным сигналом передача информации осуществляется путем модуляции переменного гармонического сигнала относительно высокой частоты, называемой несущей, сигналом более низкой частоты, несущим информацию. Дискретные системы включают в свой состав хотя бы один элемент, который передает информацию с перерывами во времени. Одномерные системы служат для управления лишь одним параметром технологического процесса и имеют в своем составе элементы только с одним входом и одним выходом. Многомерные системы предназначены для управления несколькими параметрами технологического процесса и (или) включают в свой состав элементы с несколькими входами и (или) выходами. Линейные системы состоят из элементов, которые могут быть описаны линейными математическими зависимостями. Нелинейная система обладает хотя бы одним элементом, который может быть описан только нелинейной зависимостью. В самом общем виде любая система схематично может быть представлена следующим образом (рис. 2.2.).
Рис. 2.2. Структура системы автоматического управления (САУ): прямая связь — это информационный канал, по которому сигнал передается от входа к выходу системы; обратная связь — это информационный канал, по которому выходной сигнал системы передается на вход. Задачами ТАУ являются анализ, изучение и синтез САУ с заданными свойствами. С учетом требований технологии и эффективности производства выбирается вариант реализации САУ.
Рис. 2.3. Разомкнутая система управления В состав разомкнутой системы (рис. 2.3.) входят только элементы, находящиеся в прямой связи: задатчик (кнопка), управляющее устройство (программно-временное устройство), исполнительный механизм (двигатели), регулирующий орган (движители) и объект управления (транспортное средство). Датчик, измеритель и элемент сравнения в разомкнутых системах отсутствуют. Такие системы целесообразно применять лишь в тех случаях, когда команды программно-временного устройства выполняются с достаточной точностью и отсутствуют чувствительные помехи их выполнению.
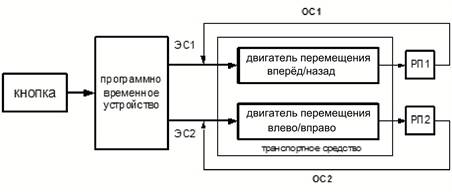
Рис. 2.4. Замкнутая система управления: РП1, РП2 — датчики положения транспортного средства; ОС1, ОС2 — каналы обратной связи, по которым информация о выполнении команд управляющего устройства передается на элементы сравнения ЭС1, ЭС2.
Если нет уверенности в том, что команды управляющего устройства будут выполнены точно, то разомкнутую систему дополняют обратной связью, и образуется замкнутый контур (рис. 2.4.). Работу замкнутой системы можно представить следующим образом. После нажатия кнопки программное устройство выдает команды на двигатели с таким расчетом, чтобы транспортное средство (например, тележка) переместилось из одного пункта в другой, положение которого определяется координатами на плоскости. Датчики положения регуляторов РП1 и РП2 передают сигналы, характеризующие положение транспортного средства в пространстве, в свое управляющее устройство. Если положение транспортного средства не соответствует заданному, то управляющее устройство подает дополнительные сигналы до того момента, когда заданные координаты положения будут достигнуты. При разомкнутой системе управления транспортное средство остановится в том месте, где закончится время действия команды программного устройства. Лекция № 3 Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1241; Нарушение авторского права страницы