
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Понятие алгоритма. Свойства алгоритмов.Стр 1 из 11Следующая ⇒
Введение Понятие алгоритма. Свойства алгоритмов. Возможность автоматизации деятельности человека (Информатика)
Каждому из нас постоянно приходится встречаться с множеством задач: от простых и хорошо известных до очень сложных. Для многих задач уже существуют определенные правила (инструкции, предписания), объясняющие, как решать данную задачу. Эти правила человек может изучить заранее или сформулировать сам в процессе решения задачи. Такие правила принято называть алгоритмами. Под алгоритмом в общем смысле понимают точное предписание (указание) исполнителю совершить определенную последовательность действий, направленных на достижение поставленной цели или решение поставленной задачи. Слово алгоритм происходит от algorithmi — латинской формы написания имени великого математика IX века аль-Хорезми, который сформулировал правила выполнения арифметических действий. Первоначально под алгоритмами и понимали только правила выполнения четырех арифметических действий над многозначными числами. В дальнейшем это понятие стали использовать вообще для обозначения последовательности действий, приводящих к решению поставленной задачи. Вот пример алгоритма нахождения середины отрезка при помощи циркуля и линейки. Алгоритм предписывает выполнять одно конкретное законченное действие. Исполнитель не может перейти к выполнению следующей операции, не закончив полностью выполнения предыдущей. Предписания алгоритма надо выполнять последовательно одно за другим в соответствии с указанным порядком. Выполнение всех предписаний гарантирует правильное решение задачи. Анализ примеров различных алгоритмов показывает, что запись алгоритма распадается на отдельные указания исполнителю выполнить некоторое законченное действие. Каждое такое указание алгоритма выполняется одно за другим. После каждого шага исполнения алгоритма точно известно, какое действие должно выполняться следующим. Поочередное выполнение указаний алгоритма за конечное число шагов приводит к решению задачи, к достижению цели. Разделение выполнения решения задачи на отдельные операции — важное свойство алгоритмов, называемое дискретностью. Каждый алгоритм строится в расчете на конкретного исполнителя. Для того чтобы исполнитель мог решить задачу по заданному алгоритму, необходимо, чтобы он был в состоянии понять и выполнить каждое действие, предписываемое командами алгоритма. Такое свойство алгоритмов называется определенностью (или точностью) алгоритма. Совокупность команд, которые могут быть выполнены исполнителем, называется системой команд исполнителя. Еще одно важное требование, предъявляемое к алгоритмам, — результативность (или конечность) алгоритма. Оно означает, что исполнение алгоритма должно закончиться за конечное число шагов. Еще один пример алгоритма. Игра «Ваше» (в игре участвуют двое). Вот частный случай этой игры. Имеется 15 предметов. Соперники ходят по очереди, за каждый ход любой из играющих может взять 1, 2 или 3 предмета. Проигрывает тот, кто вынужден взять последний предмет. Алгоритм выигрыша для первого игрока имеет следующий вид: 1) взять 2 предмета; 2) второй и последующий ходы делать так, чтобы количество предметов, взятых вместе с соперником за очередной ход, в сумме составляло 4. Данный алгоритм приводит к выигрышу для 7, 11, 15, 19... предметов. Человек, пользующийся данным алгоритмом, всегда будет выигрывать в этой игре. Ему совершенно не обязательно знать, почему надо поступать именно так, а не иначе. Для успешной игры от него требуется только строго следовать алгоритму. Таким образом, выполняя алгоритм, исполнитель может не вникать в смысл того, что он делает, и вместе с тем получать нужный результат. В таком случае говорят, что исполнитель действует формально, т.е. отвлекается от содержания поставленной задачи и только строго выполняет некоторые правила, инструкции. Это очень важная особенность алгоритмов. Наличие алгоритма формализовало процесс, исключило рассуждения. Если обратиться к примерам других алгоритмов, то можно увидеть, что и они позволяют исполнителю действовать формально. Таким образом, создание алгоритма дает возможность решать задачу формально, механически исполняя команды алгоритма в указанной последовательности. Построение алгоритма для решения задачи из какой-либо области требует от человека глубоких знаний в этой области, бывает связано с тщательным анализом поставленной задачи, сложными, иногда очень громоздкими рассуждениями. На поиски алгоритма решения некоторых задач ученые затрачивают многие годы. Но когда алгоритм создан, решение задачи по готовому алгоритму уже не требует каких-либо рассуждений и сводится только к строгому выполнению команд (указаний) алгоритма. В этом случае исполнение алгоритма можно поручить не человеку, а машине. Действительно, простейшие операции, на которые при создании алгоритма расчленяется процесс решения задачи, может реализовать и машина, специально созданная для выполнения отдельных команд алгоритма и выполняющая их в последовательности, указанной в алгоритме. Это положение и лежит в основе работы автоматических устройств, автоматизации производственной деятельности человека. Лекция № 1 Основные понятия и определения технологических процессов и Теории автоматического управления (ТАУ) Технологический процесс - сложный комплекс действий оборудования и исполнителей по преобразованию исходных материалов в готовое изделие. В обобщённом виде технологический процесс можно характеризовать как последовательность технологических операций, необходимых для выполнения определённого вида работ. Всякая производственная деятельность осуществляется в определенной последовательности, называемой технологическим процессом. Технологический процесс (ТП) можно характеризовать как упорядоченную последовательность взаимосвязанных действий (алгоритм), выполняющихся над исходными материалами до получения требуемого готового продукта. По ГОСТ 3.1109-82, технологический процесс — это часть производственного процесса, содержащая целенаправленные действия по изменению и (или) определению состояния предмета труда. К предметам труда относят заготовки и изделия. Практически любой технологический процесс можно рассматривать как часть более сложного процесса и в то же время как совокупность менее сложных (в пределе — элементарных) технологических процессов. Технологической операцией называется наименьшая часть технологического процесса, обладающая всеми его свойствами. То есть это такой ТП, дальнейшее дробление которого приводит к потере признаков, характерных для данной технологии. Как правило, каждая технологическая операция выполняется на одном рабочем месте. Примером технологических операций в производстве бетонных изделий могут служить приготовление бетонной смеси, изготовление арматуры, формование изделия, его тепловая обработка и т.п. Лекция № 2 Классификация САУ. Примеры реальных САУ Все разнообразие систем автоматического управления можно отнести к нескольким группам в соответствии с их отличительными особенностями. В каждом конкретном случае с учетом особенностей объекта управления подбирается система управления из множества разновидностей систем, показанных на рис. 2.1. . Рис. 2.1. Классификация систем автоматического управления Сокращения: с модул.сигн. – с модулированным сигналом; нестационарн. – нестационарные; с распр. пар. – с распределёнными параметрами. Разомкнутые системы не имеют обратной связи и используются в тех случаях, когда помехи работе системы пренебрежимо малы. Замкнутые системы имеют обратную связь и обеспечивают более точное выполнение поставленных перед ними задач в условиях существенных возмущающих воздействий. Комбинированные системы формируют свое управляющее воздействие с учетом сигналов обратной связи и информации о возмущающих воздействиях, что позволяет более эффективно решать поставленные перед ними задачиСистемы стабилизации применяют для поддержания управляемых параметров технологического процесса постоянными во времени. Системы программного управления используют для изменения управляемых параметров технологического процесса по заданному во времени или пространстве закону (программе). Следящие системы служат для отображения отслеживаемых параметров технологического процесса, изменяющихся по неизвестному заранее закону. Настраиваемые системы настраиваются перед их включением в нормальную работу и не изменяют алгоритма своего функционирования и характеристик до возникновения неисправности или осуществления настройки. Адаптивные (самонастраивающиеся) системы обладают способностью изменять свои характеристики или алгоритм функционирования в зависимости от условий функционирования с целью улучшения качества управления. Игровые системы сами строят свою стратегию поведения в зависимости от собственной цели и поведения противодействующей системы (стороны). Стационарные системы не изменяют своих характеристик в процессе нормального функционирования. Нестационарные системы включают в свой состав хотя бы один элемент, характеристики которого изменяются во времени. Системы с распределенными параметрами включают в свой состав хотя бы один элемент, характеристики которого зависят от пространственных координат. Системы непрерывного действия характеризуются тем, что информация в контуре управления циркулирует непрерывно во времени. В системах с гармоническим модулированным сигналом передача информации осуществляется путем модуляции переменного гармонического сигнала относительно высокой частоты, называемой несущей, сигналом более низкой частоты, несущим информацию. Дискретные системы включают в свой состав хотя бы один элемент, который передает информацию с перерывами во времени. Одномерные системы служат для управления лишь одним параметром технологического процесса и имеют в своем составе элементы только с одним входом и одним выходом. Многомерные системы предназначены для управления несколькими параметрами технологического процесса и (или) включают в свой состав элементы с несколькими входами и (или) выходами. Линейные системы состоят из элементов, которые могут быть описаны линейными математическими зависимостями. Нелинейная система обладает хотя бы одним элементом, который может быть описан только нелинейной зависимостью. В самом общем виде любая система схематично может быть представлена следующим образом (рис. 2.2.).
Рис. 2.2. Структура системы автоматического управления (САУ): прямая связь — это информационный канал, по которому сигнал передается от входа к выходу системы; обратная связь — это информационный канал, по которому выходной сигнал системы передается на вход. Задачами ТАУ являются анализ, изучение и синтез САУ с заданными свойствами. С учетом требований технологии и эффективности производства выбирается вариант реализации САУ.
Рис. 2.3. Разомкнутая система управления В состав разомкнутой системы (рис. 2.3.) входят только элементы, находящиеся в прямой связи: задатчик (кнопка), управляющее устройство (программно-временное устройство), исполнительный механизм (двигатели), регулирующий орган (движители) и объект управления (транспортное средство). Датчик, измеритель и элемент сравнения в разомкнутых системах отсутствуют. Такие системы целесообразно применять лишь в тех случаях, когда команды программно-временного устройства выполняются с достаточной точностью и отсутствуют чувствительные помехи их выполнению.
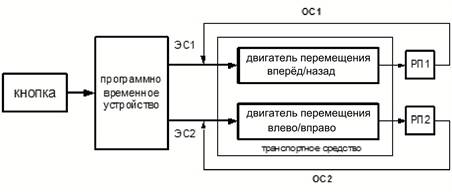
Рис. 2.4. Замкнутая система управления: РП1, РП2 — датчики положения транспортного средства; ОС1, ОС2 — каналы обратной связи, по которым информация о выполнении команд управляющего устройства передается на элементы сравнения ЭС1, ЭС2.
Если нет уверенности в том, что команды управляющего устройства будут выполнены точно, то разомкнутую систему дополняют обратной связью, и образуется замкнутый контур (рис. 2.4.). Работу замкнутой системы можно представить следующим образом. После нажатия кнопки программное устройство выдает команды на двигатели с таким расчетом, чтобы транспортное средство (например, тележка) переместилось из одного пункта в другой, положение которого определяется координатами на плоскости. Датчики положения регуляторов РП1 и РП2 передают сигналы, характеризующие положение транспортного средства в пространстве, в свое управляющее устройство. Если положение транспортного средства не соответствует заданному, то управляющее устройство подает дополнительные сигналы до того момента, когда заданные координаты положения будут достигнуты. При разомкнутой системе управления транспортное средство остановится в том месте, где закончится время действия команды программного устройства. Лекция № 3 Пример 1
Пример 2 При последовательном соединении двух динамических звеньев (рис. 3.3.) с передаточными функциями Рис. 3.3. Последовательное соединение динамических звеньев
общая АФЧХ соединения определяется следующим образом
где
Пример 3 С помощью АФЧХ можно определить устойчивость любой линейной САУ. Критерий устойчивости Михайлова:
Характеристическое уравнение: D(p) = p3 + p2 + p + 1; D(jw) = (jw)3 + (jw)2 + jw + 1 = (1 — w2) + j(w — w3); U(w) = 1 — w2; V(w) = w(1 — w2). Результаты расчёта устойчивости САУ приведены в таблице, а изображение годографа показано на рис. 3.4. Таблица Результаты расчёта годографа
Рис. 3.4. Годограф характеристического уравнения Вывод: судя по годографу, система находится на границе устойчивости. Лекция № 4 Пример 1 Нелинейная функция вида
Рис. 4.2. Нелинейная функция с ограничением по времени Здесь T = 2p, a w = 2p/T = 1 и
при k = 1, Из последнего выражения следует, что все коэффициенты bk с четными индексами равны нулю, а с нечетными —
где n = 0, 1, 3, ..., k.
Функцию Fn( Более точное приближение получается, если дискретность частот гармонических составляющих стремится к нулю, а число гармоник — к бесконечности.
где
Поскольку функция, F(τ ), как следует из предыдущего выражения, представляет собой сумму бесконечного числа колебаний с амплитудами, зависящими от частоты
и фазы
выражение F(τ ) можно также представить следующим образом:
При рассмотрении функции F(τ ) в пределах от -¥ до ¥ в силу симметрии косинуса это выражение принимает вид:
Или в комплексной форме:
Интеграл Фурье дает разложение временной функции F(τ ) в непрерывный спектр, тогда как ряды Фурье — в дискретный с частотами w = 2p, 4p, 6p и т.д. Плотность спектра (спектральная плотность) характеризуется зависимостью:
Тогда с учетом этого интеграл Фурье можно записать в виде:
Пример 2
Пример 3
При b ® 0 в примере 2 F(τ ) ® 1 при τ > 0. Тогда в соответствии с предыдущим выражением можно записать выражение для единичной ступенчатой функции:
Исходя из рассмотренных зависимостей Фурье, предложено интегральное преобразование
В соответствии с формулой Эйлера прямое преобразование Фурье можно представить в виде:
Лекция № 5 Свойства преобразования Фурье Результат прямого преобразования Фурье можно представить в виде:
где Если функция f(τ ) определена только при τ > 0, т.е. f(τ ) = 0 при τ < 0, рассмотренные функции F1(w) и F2(w) имеют самостоятельное название и значение:
Пример 1 Преобразование Фурье применяется при исследовании частотных характеристик САУ и ее элементов. Для САУ с весовой функцией
преобразование Фурье имеет вид:
Здесь функция F(jw) является амплитудно-фазо-частотной характеристикой (АФЧХ) системы автоматического управления (САУ). Такой же результат может быть достигнут, если воспользоваться синус- и косинус-преобразованиями Фурье
Рассмотренные зависимости справедливы в тех случаях, когда F(τ ) = 0 при τ < 0. В противном случае, если при τ < 0 F(τ ) ¹ 0, то имеет место равенство: τ
что существенно затрудняет аналитическое исследование рассматриваемой функции. Для выхода из этого положения пользуются преобразованием Лапласа, которое будет рассмотрено далее. Кроме того, следует заметить, что для многих функций интеграл при преобразовании Фурье расходится. Например, ebτ = ¥ при b > 0 и τ = ¥. Если вместо функции f(τ ) рассматривают функцию Следовательно, если ввести нормирующую функцию e-xτ , то интеграл Фурье практически всегда сходится при τ ® ¥.
Поскольку обратное преобразование Фурье имеет вид:
прямое и обратное преобразование функций представляется следующим образом:
Если ввести обозначение s = x + jw, то Fx(jw) = F(x+jw) = F(s). Поскольку x = const, a -¥ < w < ¥ , x - j¥ < s < x + j¥, т.е. изменению переменной s соответствует перемещение F(s) по мнимой оси комплексной плоскости (рис. 5.1). Рис. 5.1. Отображение переменной s на комплексной плоскости С учетом введенного обозначения прямое и обратное преобразование Фурье принимает вид:
где Im (s) = w — частота гармоники разложения f(τ ) в спектр; Re (s) = x — декремент затухания гармоники разложения f(τ )в спектр; выражение (5.1) представляет собой интеграл Лапласа. Пример 2 Преобразование функции F(τ ), где
Приведенное в примере 1 преобразование называют интегральным преобразованием Лапласа, которое определяется интегралом
Более общим операционным преобразованием является интегральное преобразование Лапласа. Здесь оператор s заменен оператором р:
где Таким образом:
Следовательно, преобразование Фурье является частным случаем преобразования Лапласа и получается: Следствия: 1. Для вычисления преобразования Фурье можно пользоваться таблицами преобразования Лапласа. 2. Преобразование Лапласа существует для широкого класса функций. Лекция № 6 Свойства непрерывного преобразования Лапласа Как показано выше, в основе операционного исчисления лежит интегральное преобразование Лапласа, которое является развитием преобразования Фурье. В общем виде преобразование Лапласа может быть представлено в виде выражения
Преобразование Лапласа имеет следующие свойства: 1) однозначность: L[F( 2) линейность:
3) дифференцирование: 4) интегрирование: 5) свертка оригиналов: L[F1(τ )*F2(τ )] = F1(р)× F2(р); 6) умножение оригиналов:
7) смещение: Примеры получения отображений по оригиналам:
Здесь При нулевых начальных условиях (F(τ ) = 0приτ £ 0) и отсутствии у функции F(jw) полюсов справа от мнимой оси комплексной плоскости преобразование Фурье совпадает с преобразованием Лапласа, если p = jw. Такое предположение справедливо для многих аналитических функций, применяемых для математического описания САУ. Большинство из них приведено в следующей таблице. Таблица преобразования Лапласа непрерывных функций
Лекция № 7 Пример Пусть поведение объекта или системы характеризуется дифференциальным уравнением
или передаточной функцией
Тогда при u(t) = 1(t) переходная функция определяется выражением: H(τ ) = K× (1 — e-t/T). Импульсная переходная функция u(t) = d(t)
Амплитудно-фазо-частотная характеристика
Амплитудно-частотная характеристика
Фазо-частотная характеристика F(w)= arctg (-T× w). Логарифмическая амплитудно-частотная характеристика
Лекция № 8 Лекция № 9 Начальных условиях Пусть имеется дифференциальное уравнение, записанное в стандартной форме:
где m < n. После преобразования (9.1) по Лапласу оно принимает вид:
или
Алгебраическое уравнение (9.2) решается в следующем порядке:
Пример 1
После преобразования по Лапласу:
Для того чтобы воспользоваться таблицей обратного преобразования Лапласа, необходимо выражение (9.3) представить в следующем виде:
Тогда в соответствии с таблицей преобразования Лапласа:
Начальных условиях Пусть имеется дифференциальное уравнение с ненулевыми начальными условиями, представленное в следующем виде:
при начальных условиях: [dn-1X(t)/dτ n-1]0 — начальное значение (n-1)-ой производной функции X(τ ); [dn-2X(τ )/dτ n-2]0 — начальное значение (n-2)-ой производной функции X(τ ); [dX(τ )/dτ ]0 — начальное значение первой производной функции X(τ ); X0 — начальное значение функции X(τ ). После преобразования уравнения (9.4) по Лапласу с учетом начальных условий получается уравнение вида: {pnX(p) – pn-1× X0 – pn-2× [dX(τ )/dτ ]0 – … – p× [dn-2X(τ )/dτ n-2]0 – p0× [dn-1X(τ )/dtn-1]0} + + an-1× {p n-1X(p) – pn — 2× X0 – pn — 3× [dX(t)/dt]0 – … – p0× [dn-2X(t)/dtn-2]0} +... + a0X(p)= = U(p). (9.5) После алгебраических преобразований решение уравнения (9.5) можно представить в виде:
Оригинал решения уравнения (9.4) определяется из зависимости: X(t) = L-1{X(p)}. Пример 2 Пусть имеется уравнение:
Чтобы воспользоваться таблицей преобразований Лапласа, необходимо уравнение (9.6) преобразовать по Лапласу и выполнить математические операции: pX(p) – p0X0 + 2X(p) = U(p); (p + 2)X(p) = 1/p + X0;
Воспользовавшись таблицей преобразования Лапласа, можно получить:
Из выражения (9.7) видно, что X(0) = 2, a X(¥ ) = 1/2. Пример 3 Дифференциальное уравнение второго порядка:
После преобразования уравнения (9.8) по Лапласу получается алгебраическое уравнение вида:
Для того чтобы воспользоваться таблицей преобразования Лапласа, необходимо найти корни характеристического уравнения: p2 + a1p + a2 = 0;
Если корни вещественны, то решение уравнения (9.9) имеет вид
Если корни различны (k2 ¹ k1), то по таблице Лапласа получается
Если корни одинаковы (k2 = k1 = k), то выражения (9.10) и (9.11) принимают вид:
Решение (9.12) отличается от решения (9.11) возможностью возникновения колебаний решения X(τ ) при соответствующих соотношениях коэффициентов. Если корни комплексно сопряженные, то решение уравнения (9.9) отличается от приведенных в примере 3 тем, что решение обязательно имеет колебательный характер. При p2 + a1p + a2 = 0 имеет комплексно сопряженные корни:
или k1 = k + jq; k2 = k – jq, где Тогда решение X(p) уравнения (9.8) имеет вид:
Оригинал решения (9.13) характеризуется выражением: Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1688; Нарушение авторского права страницы





 , где
, где ;
; 
 ;
; 
 и
и 







 .
.
 представлена на рис. 4.2.
представлена на рис. 4.2.



 .
. . Тогда для k = 1, 3, 5, ...
. Тогда для k = 1, 3, 5, ...
 ) можно считать аналитической, приближенно отражающей функцию F(
) можно считать аналитической, приближенно отражающей функцию F( 



 ,
, 
 .
.






 — прямое преобразование Фурье;
— прямое преобразование Фурье;  — обратное преобразование Фурье.
— обратное преобразование Фурье.


 — косинус-преобразование Фурье;
— косинус-преобразование Фурье;  — синус-преобразование Фурье.
— синус-преобразование Фурье.
 , где
, где — вещественная часть АФЧХ;
— вещественная часть АФЧХ;  — мнимая часть АФЧХ.
— мнимая часть АФЧХ.
 , где х = const, то интеграл преобразования Фурье сходится для большинства аналитических функций. Например, если x > b, то e-xτ ebτ = e(b-x)τ = 0 при τ = ¥ .
, где х = const, то интеграл преобразования Фурье сходится для большинства аналитических функций. Например, если x > b, то e-xτ ebτ = e(b-x)τ = 0 при τ = ¥ .



 (5.1)
(5.1)
 , принимает вид:
, принимает вид: 


 .
.


 )] = F(р), L-1[F(р)] = F(
)] = F(р), L-1[F(р)] = F( 








 .
.
 .
. .
.
 (9.1)
(9.1)
 (9.2)
(9.2)





 (9.3)
(9.3)

 (9.4)
(9.4)
 (9.6)
(9.6)

 (9.7)
(9.7) (9.8)
(9.8)
 (9.9)
(9.9) (9.10)
(9.10)


 (9.11)
(9.11) (9.12)
(9.12) характеристическое уравнение
характеристическое уравнение

 (9.13)
(9.13)