|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ устойчивости замкнутой системы
Замкнутую САУ (регулятор которой подключен к объекту в цепи отрицательной обратной связи) сначала проверяют на устойчивость при заданных значениях параметров настройки регулятора. Неустойчивая система неработоспособна, и нет смысла анализировать качество ее работы. При исследовании замкнутой системы на устойчивость рассматривают ее так называемое свободное движение, т.е. движение, которое появляется в системе после подачи и снятия возмущающего воздействия.
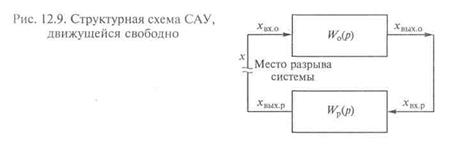
Русский математик А. М. Ляпунов доказал, что если система, движущаяся свободно, будет устойчивой, то будет устойчивой и система с вынужденным движением, на которую возмущение действует постоянно. Математический анализ на устойчивость системы, движущейся свободно, значительно проще анализа системы с вынужденным движением. Таким образом, замкнутая система будет устойчивой, если после подачи и снятия возмущающего воздействия она через конечный промежуток времени возвращается в состояние равновесия. Примером свободного движения являются свободные колебания маятника, который качнули. При свободном движении входной сигнал системы — возмущающее воздействие после снятия отсутствует. Объект и регулятор в свободном движении замкнуты только друг на друга. Структурная схема САУ, движущейся свободно, изображена на рис. 12.9. На этой схеме х — сигнал связи регулятора с объектом. Для анализа на устойчивость замкнутой системы, движущейся свободно, разорвем ее (см. на схеме место разрыва системы), после чего получим цепь из последовательно соединенных объекта и регулятора. Передаточная функция этой разомкнутой САУ, движущейся свободно, будет иметь вид
Для лучшего понимания последующих математических действий и выводов рассмотрим для примера систему, в которой объект аппроксимирован апериодическим звеном, а регулятор имеет ПИ-закон регулирования, тогда
Следовательно, для данного примера
Если раскрыть эти отношения, получим дифференциальное уравнение свободного движения разомкнутой системы, записанное в операторной форме:
Теперь замкнем систему, движущуюся свободно. При замыкании, поскольку регулятор работает в цепи отрицательной обратной связи, имеет место следующее равенство:
или
Однако хвых.p(p) и хвх.o(p)- это сигнал х (см. рис. 12.9), поэтому предыдущее дифференциальное уравнение свободного движения данной замкнутой системы можно записать следующим образом:
или после преобразования
Если полином в квадратных скобках дифференциального уравнения свободного движения замкнутой системы приравнять к нулю, получим характеристическое уравнение замкнутой системы. Для данной системы характеристическое уравнение будет иметь вид
Характеристическое уравнение замкнутой системы в общем виде следующее:
Характеристическое уравнение, видимо, потому и названо характеристическим, что его корни «характеризуют», будет замкнутая система устойчивой или нет. Для системы, движущейся свободно, неважно в какой точке разомкнули (разорвали) кольцо из объекта и регулятора, т. е. можно записать, что сигнал х = хвых.о — регулируемый параметр. Общим решением дифференциального уравнения свободного движения замкнутой сис
τ — текущее время; Сk— постоянные интегрирования, зависящие от начальных условий свободного движения системы (мощности первоначального возмущающего воздействия); е = 2, 71; рк— корни характеристического уравнения замкнутой системы; п — количество постоянных интегрирования. Поскольку характеристическое уравнение замкнутой системы получено из дифференциального уравнения свободного движения замкнутой системы, записанного в операторной форме (преобразованного по Лапласу), оно является алгебраическим. Корни алгебраического уравнения (характеристического) могут быть действительными, комплексными, положительными и отрицательными. Рассмотрим эти варианты. 1. Все корни характеристического уравнения замкнутой системы действительные и отрицательные. В этом случае решение дифференциального уравнения свободного движения замкнутой системы можно записать следующим образом:
При τ → ∞ (от нуля, без отрицательных т) в дроби 1/еpкτ к бесконечности стремится знаменатель еркτ , а сама дробь стремится к нулю. Следовательно, с течением времени к нулю стремится и каждое из п слагаемых суммы, а также хвых(τ ) — значение регулируемого параметра в замкнутой системе, движущейся свободно. Значит, после подачи и снятия возмущающего воздействия система с течением времени приходит в состояние равновесия, т.е. такая замкнутая система — устойчивая 2. Один корень характеристического уравнения замкнутой системы положительный (р1 > 0), остальные — отрицательные (рк < 0 для 2 < k < п). В этом случае решение дифференциального уравнения свободного движения замкнутой системы запишем следующим образом:
В этом случае сумма нулю, но слагаемое Следовательно, непрерывно растет и хвых(τ ) — регулируемый параметр, т.е. замкнутая система будет неустойчивой. 3. Один корень характеристического уравнения равен нулю (р1 = 0), остальные — отрицательные Разобьем сумму на два слагаемых:
Здесь второе слагаемое стремится к нулю, а первое слагаемое Следовательно, выходной сигнал — регулируемый параметр в такой системе с течением времени приобретает вид незатухающих синусоидальных колебаний с амплитудой С1 т.е. теоретически замкнутая система находится на границе устойчивости, а практически она неустойчивая. 4. Корни характеристического уравнения замкнутой системы — комплексные числа (рк= ± тk ± ink). В этом случае решение дифференциального уравнения свободного движения замкнутой системы будет иметь вид
Из предыдущих вариантов ясно, что если все действительные части (тk) всех комплексных корней характеристического уравнения замкнутой системы отрицательные, то такая система будет устойчивой. Мнимые части комплексных корней (± ink) характеристического уравнения на устойчивость влияния не оказывают, так как соs(пkτ ) и sin(пkτ ) изменяются в пределах от +1 до -1. Однако
от мнимых частей комплексных корней характеристического уравнения зависит колебательность процесса регулирования: с возрастанием пk быстрее изменяется угол φ = nkτ и, следовательно, выше частота колебаний процесса регулирования.
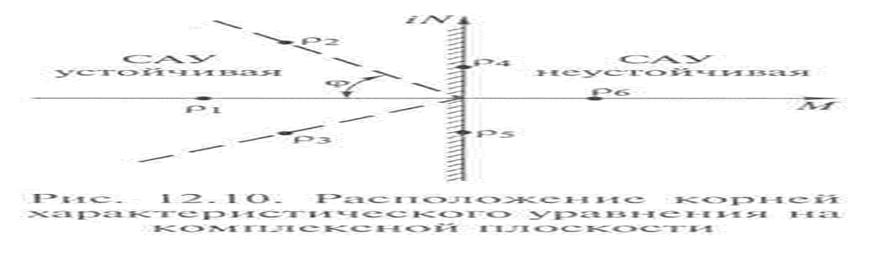
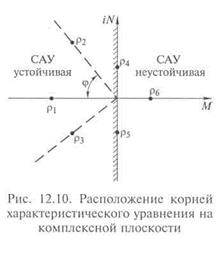
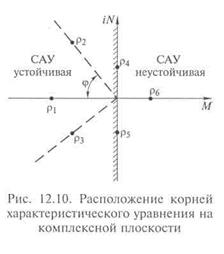
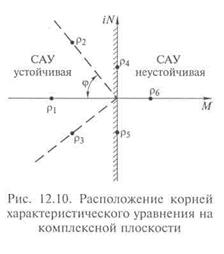
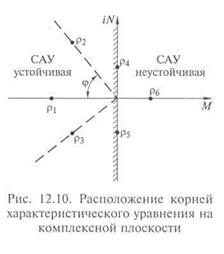
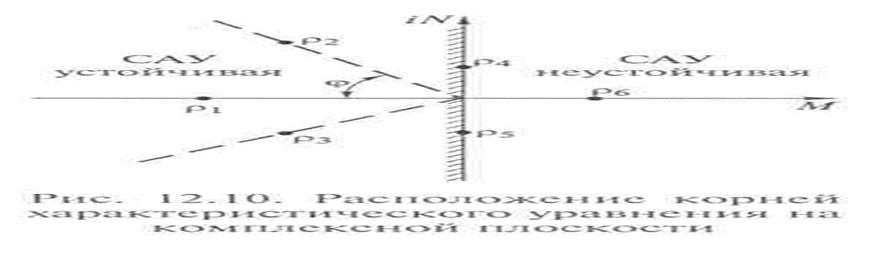
Для анализа устойчивости замкнутой САУ удобно корни характеристического уравнения разместить на комплексной плоскости (рис. 12.10). Если все корни (действительные и комплексные) располагаются в левой полуплоскости, то система ус-
тойчивая; если хотя бы один корень характеристического уравнения попадает в правую полуплоскость — система неустойчивая; если действительный корень равен нулю или есть чисто мнимые корни — система находится на границе устойчивости, т. е. практически она неустойчивая. Также чем ближе отрицательный действительный корень к мнимой оси комплексной плоскости, тем меньшим запасом устойчивости обладает замкнутая система, и чем меньше действительная часть комплексного корня характеристического уравнения, тем меньше запас устойчивости. Как правило, комплексные корни характеристического уравнения замкнутой САУ сопряженные, т. е. рk = тk + ink; рk+1 = тk+ 1 - ink+1. Следовательно, большая мнимая часть (пк) комплексных корней характеристического уравнения определяет колебательность или частоту колебаний процесса регулирования, т.е. чем больше угол φ (см. рис. 12.10), тем больше колебаний совершает система, приходя в равновесное состояние.
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1956; Нарушение авторского права страницы





 Следовательно, дифференциальное уравнение свободного движения данной замкнутой системы будет имеет вид
Следовательно, дифференциальное уравнение свободного движения данной замкнутой системы будет имеет вид



 В общем виде дифференциальное уравнение свободного движения замкнутой САУ по аналогии можно записать следующим образом:
В общем виде дифференциальное уравнение свободного движения замкнутой САУ по аналогии можно записать следующим образом: 


 ,
, 

 с течением времени стремится к
с течением времени стремится к непрерывно возрастает.
непрерывно возрастает.
 при
при  c течением времени
c течением времени