|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Такие что при выполнении всех имеющихся технологических, ресурсных и экологических ограничений обеспечивается достижение максимальной прибыли от реализации изготавливаемой продукции.
Все рассмотренные выше задачи могут быть сведены к задачам линейного программирования или частично целочисленного линейного программирования. Общая задача линейного программирования Постановка задачи В общем виде задача линейного программирования записывается следующим образом: Дано: 1. Множество переменных (неизвестных) задачи
2. Множество допустимых решений задачи Q (система условий задачи), задаваемое в виде системы линейных ограничений a11· x1 + … + a1j· xj +…+ a1n· xn = b1 ………………………………….. ai1· x1 + … + aij· xj +… + ain· xn = bi …………………………………..
ak+1 1· x1 + … + a k+1 j· xj+…+ a k+1 n· xn≤ b k+1 ………………………………….. am1· x1 + … + amj· xj+ … + amn· xn≤ bm xj≥ 0 для
3. Функционал задачи (линейная форма задачи) F(x)=f1· x1 + … + fj· xj+… + fn· xn F(x)=f· x, где f=(f1, f2, … fj, …, fn) – вектор строка коэффициентов функционала. 4. Матрица условий задачи
5. Векторстолбецправой части ограничений
6. Матричная форма задачи оптимизации

Если ищется максимум функционала Найти: Если ищется минимум функционала Найти: Область Q, заданная системой линейных уравнений и неравенств, представляет собой выпуклый многогранник в n -мерном пространстве, а экстремум линейной функции Канонической формой модели линейного программирования является модель, в которой система ограничений
Задача линейного программирования, записанная в общем виде, легко сводится к каноническойформе путем ввода дополнительных неотрицательных переменных
В функционал задачи переменные Во всех случаях, когда задача линейного программирования разрешима, ее решение сводится к упорядоченному перебору вершин n -мерного многогранника. Геометрическая интерпретация задачи линейного программирования Далее без ограничения общности будет рассматриваться задача вида
Найти: Геометрическая интерпретация будет рассматриваться на примере двухмерного пространства, т.е. для n=2 (рис. 13). В двухмерном пространстве неравенства вида
задают уравнения полуплоскостей
Рис. 13. Геометрическая интерпретация задачи линейного программирования Значение функционалаF1=F(x11, x21) в точке (x11, x21)Î Q пропорционально расстоянию прямой F1= f1· x1 +f2· x2 от начала координат. Максимальное значение функционала будет соответствовать максимальной удаленности от начала координат прямой F= f1· x1 +f2· x2 , имеющей хотя бы одну общую точку с областью допустимых значений Q. На рисунке 12 такой точкой будет точка (x1опт, x2опт))Î Q. Элементы линейной алгебры Системы линейных алгебраических уравнений. Дана система n линейных уравнений с n неизвестными: a11x1+a12x2+…+a1jxj+…+a1nxn=b1 a21x1+a22x2+…+a2jxj+…+a2nxn=b2 ………………………………….. ai1x1+ai2x2+… +aijxj+… +ainxn=bi ………………………………….. an1x1+an2x2+…+anjxj+…+annxn=bn
В матричной форме эта система уравнений будет иметь вид:
где
Система линейных уравнений, имеющая хотя бы одно решение, называется совместной. Система линейных уравнений, не имеющая ни одного решения, называется несовместной. Система совместна и определена, если она имеет единственное решение. Система совместна и не определена, если она имеет бесконечное множество решений. Правило (теорема) Крамера. Если определитель основной матрицы системы уравнений
Если определитель основной матрицы системы уравнений
Если определитель основной матрицы системы уравнений Свойства определителей. При расчете определителей необходимо учитывать следующие его свойства: Свойство 1. Определитель не меняется при транспонировании матрицы. Свойство 2. Если одна из строк (столбцов) состоит из нулей, то определитель равен нулю. Свойство 3. Перестановка двух строк (столбцов) определителя изменяет его знак. Свойство 4.Определитель, содержащий две одинаковые строки равен нулю. Свойство 5. Если все элементы некоторой строки (столбца) определителя умножить на некоторое число k, то сам определитель умножится на число k. Свойство 6. Определитель, содержащий две пропорциональные строки, равен нулю. Свойство 7. Если все элементы i-й строки (столбца) определителя n-го порядка представлены в виде суммы двух слагаемых aij=bj+cj, то определитель равен сумме двух определителей, у которых все строки, кроме i-й, - такие же, как и в заданном определителе, а i-я строка в одном из слагаемых состоит из элементов bj, а в другом – из элементов cj. Свойство 8. Если одна из строк (столбцов) определителя равна линейной комбинации его других строк, то определитель равен нулю. Свойство 9.Определитель не меняется, если к элементам одной из ее строк (столбцов) прибавляются соответственные элементы другой строки, умноженные на одно и то же число. Свойство 10. Если все элементы определителя, расположенные по одну сторону от главной диагонали, равны нулю, то этот определитель равен произведению элементов, стоящих на главной диагонали.
Метод Жордана-Гаусса решения систем линейных алгебраических уравнений. Пусть имеется система линейных алгебраических уравнений: A.x=b Если эту систему уравнений умножить слева на обратную матрицу: A-1. A. x=A-1. b, то, учитывая, чтоA-1А = Е - единичная матрица, получим: x = A-1. b Таким образом, для того чтобы решить систему уравнений, необходимо одним из методов вычислить обратную матрицу и умножить ее на вектор правых частей системы. Этот метод удобен в тех случаях, когда система уравнений решается при различных правых частях. Тогда необходимо один раз вычислить обратную матрицу, а затем, меняя правые части, вычислять произведение этой матрицы на столбец. Алгоритмметода. 1. Выбирают первый слева столбец матрицы, в котором есть хоть одно отличное от нуля значение. 2. Если самое верхнее число в этом столбце ноль, то меняют всю первую строку матрицы с другой строкой матрицы, где в этой колонке нет нуля. 3. Все элементы первой строки делят на верхний элемент выбранного столбца. 4. Из оставшихся строк вычитают первую строку, умноженную на первый элемент соответствующей строки, с целью получить первым элементом каждой строки (кроме первой) ноль. 5. Далее проводят такую же процедуру с матрицей, получающейся из исходной матрицы после вычёркивания первой строки и первого столбца. 6. После повторения этой процедуры 7. Вычитают из предпоследней строки последнюю строку, умноженную на соответствующий коэффициент, с тем, чтобы в предпоследней строке осталась только 1 на главной диагонали. 8. Повторяют предыдущий шаг для последующих строк. В итоге получают единичную матрицу и решение на месте свободного вектора (с ним необходимо проводить все те же преобразования).
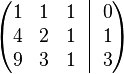
Пример Для решения следующей системы уравнений:
Запишем её в виде матрицы 3× 4, где последний столбец является свободным членом:
Проведём следующие действия: · К строке 2 добавим: − 4 × Строку 1. · К строке 3 добавим: − 9 × Строку 1. Получим:
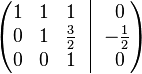
· К строке 3 добавим: − 3 умноженную на Строку 2. · Строку 2 делим на − 2
· К строке 1 добавим: − 1 × Строку 3. · К строке 2 добавим: − 3/2 × Строку 3.
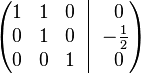
· К строке 1 добавим: − 1 × Строку 2.
В правом столбце получаем решение:
Методы решения задач линейного программирования. Существует довольно много типов задач линейного программирования и специфических методов их решения.
Рис.14. Задачи и методы линейного программирования
Все методы решения задач линейного программирования обычно разбиваются на две группы. Методы первой группы относят к конечным методам, то есть методам, обеспечивающим поиск оптимального решения задачи за конечное число шагов. Вторая группа – методы, реализующие итерационные процедуры поиска оптимума и приводящие к нахождению приближенного решения задачи. Конечные методы, в свою очередь, подразделяют на три основных класса: 1. Методы последовательного улучшения плана – симплексный метод решения задачи линейного программирования. 2. Методы последовательного уточнения оценок. 3. Методы последовательного сокращения невязок.
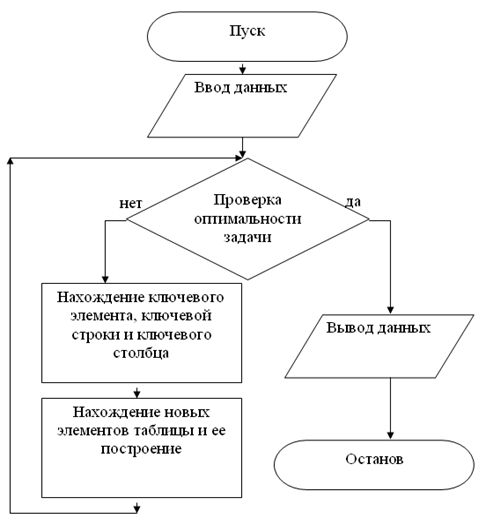
Методы последовательного улучшения плана по сути представляет собой применение метода Жордана-Гаусса к системе линейных алгебраических уравнений с количеством переменных большим количества уравнений. Такая система в общем случае имеет бесконечное множество решений, из которых с применением регулярной процедуры на каждом следующем шагенаходятся решения, улучшающие значение функционала задачи до тех пор, пока не будет достигнут оптимум. Укрупненный алгоритм этого метода представлен на рис. 15.
Рис. 15. Укрупненный алгоритм симплексного метода решения задачи ЛП
Планирование производства продукции на действующем промышленном предприятии Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 719; Нарушение авторского права страницы
 для
для 
 - вектор столбец переменных (неизвестных) задачи
- вектор столбец переменных (неизвестных) задачи

 такое, что
такое, что 
 такое, что
такое, что 
 достигается в его вершинах.
достигается в его вершинах. полностью задается системой линейных уравнений
полностью задается системой линейных уравнений .
. , которые с помощью единичной матрицы
, которые с помощью единичной матрицы  превращают систему неравенств
превращают систему неравенств  в систему уравнений (равенств)
в систему уравнений (равенств) .
.
 для
для  и
и 
 ,
,  - основная матрица системы уравнений размерности n на n;
- основная матрица системы уравнений размерности n на n;  - j-й вектор столбец основной матрицы системы уравнений;
- j-й вектор столбец основной матрицы системы уравнений;  - вектор столбец свободных членов системы уравнений;
- вектор столбец свободных членов системы уравнений;  - вектор столбец неизвестных системы уравнений;
- вектор столбец неизвестных системы уравнений;  - расширенная матрица системы уравнений.
- расширенная матрица системы уравнений. - определитель основной матрицы системы уравнений;
- определитель основной матрицы системы уравнений;  - матрица, полученная из основной матрицы системы заменой j-го столбца (j-го вектора столбца
- матрица, полученная из основной матрицы системы заменой j-го столбца (j-го вектора столбца  ) на вектор свободных членов
) на вектор свободных членов  ;
;  - определитель матрицы, полученной из основной матрицы заменой j-го столбца (j-го вектора столбца
- определитель матрицы, полученной из основной матрицы заменой j-го столбца (j-го вектора столбца  , то система уравнений совместна и определена, т.е. она имеет единственное решение, определяемое для
, то система уравнений совместна и определена, т.е. она имеет единственное решение, определяемое для  как
как .
. и найдется хотя бы один определитель
и найдется хотя бы один определитель  отличный от нуля (
отличный от нуля (  ), то система уравнений несовместна.
), то система уравнений несовместна. для
для  ), то система не определена и может иметь бесконечное множество решений или быть несовместной.
), то система не определена и может иметь бесконечное множество решений или быть несовместной. раз получают верхнюю треугольную матрицу.
раз получают верхнюю треугольную матрицу.