
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методические материалы к выполнению курсовых работ по курсу «Основы САПР»
Пример решения двухмерного уравнения Пуассона
∂ 2u/ ∂ x2 +∂ 2u/ ∂ y2 = f (x, y), (3.9) где х, y – координаты; u(x, y) – искомая функция; f (x, y) – некоторая непрерывная функция, определяемая выражением f (x, y)=exp(-x)+ exp(-y), (3.10) на прямоугольной области с граничными условиями u (xmin, y ) = sin(y 2); (3.11) u (xmax, y) = cos(3y ); (3.12) du/dy| x, y1 =10sin(x2); (3.13) du/dy| x, ym =10sin(6x). (3.14) Для решения дифференциальных уравнений в частных производных методом конечных элементов в системе MATLAB воспользуемся приложением pdetool. Запуск приложения осуществляется командой pdetool.
Рис. 3.18. Главное окно приложения pdetool Для задания прямоугольной области решения необходимо активизировать с помощью «мыши» кнопку с символом , после чего навести курсор «мыши» на рабочее поле редактора, нажать левую кнопку «мыши» в левом верхнем углу (0, 1) задаваемой прямоугольной области, переместить курсор в правый нижний угол (1, -1) области, удерживая левую кнопку, после чего отпустить ее. Прямоугольная область будет зафиксирована (рис. 3.19).
Рис. 3.19. Задание прямоугольной области решения задачи в pdetool При необходимости корректировки координат и размеров области нужно навести курсор «мыши» на изображение прямоугольника и дважды щелкнуть левой кнопкой. На экране появится окно редактирования параметров области с соответствующими полями (рис. 3.20). В первом и втором полях отображаются координаты левой нижней точки прямоугольника по осям х и y соответственно. В третьем поле – ширина прямоугольника, в четвертом – высота, в пятом – условное обозначение. Области решения произвольной формы могут быть заданы аналогичным образом с использованием кнопок, имеющих изображения прямоугольников, эллипсов и полигона. При этом результирующая область может быть определена как объединение или разность нескольких областей простой формы. Для этого в поле Set formula указываются условные обозначения областей, связанные знаком « + » в случае объединения или знаком « ~ » в случае разности (см. рис. 3.19).
Рис. 2.20. Окно редактирования параметров прямоугольной области решения задачи в приложении pdetool Для задания граничных условий необходимо активизировать манипулятором «мышь» кнопку с символом ∂ Ω, в результате чего окно приложения примет вид, показанный на рис. 3.21.
Рис. 3.21. Задание граничных условий в приложении pdetool
Все границы области показаны линиями со стрелками, причем по умолчанию на них заданы условия Дирихле (красные линии на экране). Для редактирования граничных условий необходимо дважды щелкнуть левой кнопкой «мыши» на выбранной границе и внести соответствующие изменения в полях окна редактирования граничных условий (рис. 3.22).
Рис. 3.22. Задание граничных условий на левой границе Для редактирования вида дифференциального уравнения и ввода его функций и коэффициентов необходимо активизировать манипулятором «мышь» кнопку с символами PDE, после чего внести соответствующие изменения в полях окна редактирования, показанного на рис. 3.23
Рис. 3.24. Задание граничных условий на нижней границе
Рис. 3.25. Задание граничных условий на верхней границе
Рис. 3.26. Окно редактирования уравнения задачи в приложении pdetool Формирование триангулярной сетки с использованием метода Делоне
Рис. 3.27. Генерация триангулярной сетки с использованием метода Делонев приложении pdetool
Рис. 3.28. Увеличение числа элементов сетки в приложении pdetool Решение задачи осуществляется при активизации кнопки с символом « = ». По умолчанию значения функции решения выделяются различными цветами (рис. 3.29). Для графического вывода решения задачи в виде трехмерного (3D) изображения следует активизировать кнопку
на рис. 3.31.
Рис. 3.29. Решение уравнения Пуассона в приложении pdetool
Рис. 3.30. Окно редактирования параметров графического представления решения в приложении pdetool
Рис. 3.31. Представление решения уравнения Пуассона в виде 3D-изображени
6. Пример решения уравнений параболического типа . В качестве примера решения уравнений параболического типа рассмотрим нестационарное уравнение теплопроводности ρ (x, y)C(x, y)∂ T/∂ t–Δ (k(x, y)∙ Δ T)=f (x, y), (3.15) где t – время; х, y – координаты; T(x, y) – искомая функция распределения абсолютной температуры по координатам; ρ (x, y) – плотность вещества; С(x, y) – удельная теплоемкость вещества; k(x, y) – коэффициент теплопроводности вещества; f(x, y) – плотность мощности источников тепла, на прямоугольной области с граничными условиями Дирихле или Неймана на границах x = xmin, x = xmax, y = ymin, y = ymax и начальными условиями первого или второго рода на отрезке времени [tmin, tmax]. Зададим на отрезке [xmin, xmax] равномерную координатную сетку с шагом Δ х: X = {xi|i=1, 2, …, n}, (3.16) на отрезке [ymin, ymax] равномерную координатную сетку с шагом Δ y: Начальные условия первого рода для рассматриваемой задачи могут быть представлены в виде T (x, y, t1)=gt(x, y ), (3.17) где t1– начальный момент времени; gt(x, y) – некоторая непрерывная функция соответствующих координат. Начальные условия второго рода для рассматриваемой задачи могут быть представлены в виде T/∂ t |x, y, t1 = gt (x, y). (3.18) Проводя дискретизацию граничных условий Дирихле на равномерной сетке с использованием метода конечных разностей, получим T1, j, l =g1(yj ); (3.19) Tn, j, l =g2(yj ); (3.20) Ti, 1, l =g3(xi); (3.21) Ti, m, l =g4(xi), (3.22) где T1, j, l, Tn, j, l, Ti, 1, l, Ti, m, l– значения функции T(x, y, t) в точках (x1, yj, tl), (xn, yj, tl), (xi, y1, tl), (xi, ym, tl), соответственно. Таким образом, в результате дискретизации получим систему линейных алгебраических уравнений размерности n⋅ m⋅ s. Ниже приведены результаты одного из вариантов численного решения уравнения (3.15) с граничными условиями (3.19) – (3.22) и начальными условиями (3.17) или (3.18) на равномерной сетке без комментариев. Не приводя здесь код программы, отметим, что её описание необходимо сохранять в виде текстового файла с именем termo_2d.m и помещать его в каталог /WORK, находящийся в корневом каталоге системы MATLAB. Вызов функции termo_2d может осуществляться следующими командами: termo_2d; x=termo_2d; [x, y]=termo_2d; [x, y, t]=termo_2d; [x, y, t, T]=termo_2d(t0, ts, s, x0, xn, n, y0, ym, m, r, c, k, f, ... vt, gt1, v1, g1, v2, g2, v3, g3, v4, g4). При использовании первой, второй, третьей или четвертой команд функция будет выводить графически решение задачи при входных параметрах, принятых по умолчанию. На рис. 3.32. показано Окно приложения i_termo в процессе вывода результатов
Рис. 3.32. Окно приложения i_termo в процессе вывода результатов
Графики распределений температуры по координатам в различные моменты времени будут выводиться в отдельных окнах. После вывода всех графиков в новом окне будет показано изменение температуры во всех точках координатной сетки в динамическом режиме (movie). Правила вывода информации при вызове функции termo_2d аналогичны соответствующим правилам для функции puass_2d.
Рис. 3.33. Распределение температуры по координатам в различные моменты времени: а) t = 0; б) t = 1 с; в) t = 2 с; г) t = 3 с; д) t = 4 с; е) t = 5 с.
Пример решения уравнения теплопроводности. Используя метод сеток, решим уравнение теплопроводности u(0; t)=2(t+0.06); u(0.6; t)=0.84, где х Решение будем находить при h=0, 1 для t Решение: 1. В командном окне программы МАТLAB наберем следующую последовательность операторов: > > h=0.1; s=1/6; > > k=h^2*s k =0.0017 > > Nx=0.6/h+1 % число узлов координатной сетки Nx =7.0000 > > Nt=0.01/k+1 % число шагов по времени Nt = 7.0000 > > for i=1: Nx+1 % задание пространственно-временной сетки x(i)=(i-1)*h; end; > > x x = 0 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 > > for i=1: Nt+1 t(i)=(i-1)*k; end; > > t t = 0 0.0017 0.0033 0.0050 0.0067 0.0083 0.0100 % задание начальных и граничных условий > > for i=1: Nx+1 tab (1, i) = (3*x(i)*(1-x(i)))+0.12; end; > > for j=1: Nt+1 tab (j, 1)=2*(t(j)+0.06); tab (j, 7)=0.84; end; % матрица краевых условий > > tab tab =0.1200 0.3900 0.6000 0.7500 0.8400 0.8700 0.8400 0.1233 0 0 0 0 0 0.8400 0.1267 0 0 0 0 0 0.8400 0.1300 0 0 0 0 0 0.8400 0.1333 0 0 0 0 0 0.8400 0.1367 0 0 0 0 0 0.8400 0.1400 0 0 0 0 0 0.8400 % заполнение оставшейся части матрицы > > for j=2: Nt+1 for i=2: Nx tab(j, i)=1/6*(tab(j-1, i-1)+4*tab(j-1, i)+tab(j-1, i+1)); end; end; > > tab tab =0.1200 0.3900 0.6000 0.7500 0.8400 0.8700 0.8400 0.1233 0.3800 0.5900 0.7400 0.8300 0.8600 0.8400 0.1267 0.3722 0.5800 0.7300 0.8200 0.8517 0.8400 0.1300 0.3659 0.5704 0.7200 0.8103 0.8444 0.8400 0.1333 0.3607 0.5612 0.7101 0.8009 0.8380 0.8400 0.1367 0.3562 0.5526 0.7004 0.7920 0.8322 0.8400 0.1400 0.3524 0.5445 0.6911 0.7834 0.8268 0.8400 % визуализация численного решения (рис 3.30) > > surf(tab)

Рис. 3.34. Графическое решение уравнения теплопроводности
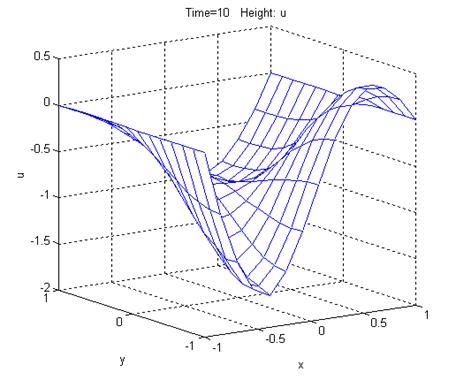
8. Пример решения уравнений гиперболического вида В этом примере рассмотрим расчет колебании тонкой пластины квадратной формы (рис. 3.13), описываемые обобщенным гиперболическим уравнением вида
Будем считать, что пластина жестко закреплена на левой и правой границах - u = 0, а два других ее края свободны - дu/дп = 0. Расчет с помощью PDETool будем проводить в следующем порядке. Вначале установим вид расчета " Generic Scalar" в окне " Application" (этот режим выбран по умолчанию). Начертим изображение пластины в графическом окне PDETool таким образом, чтобы ее центр совпал с началом координат (x = 0, у = 0) и стороны были равны, а = b = 2, где а - размер по оси x, b-размер по оси y (см. рис. 3.13).
Рис. 3.13. Модель пластины Будем задавать граничное условие Дирихле и = 0 на левой и правой сторонах. На двух других сторонах примем условие Неймана дu/дп = 0. Укажем, что задача описывается уравнением гиперболического типа, и введем соответствующие коэффициенты с = 1, а = 0, f = 0. d = 1 (рис. 3.13).
Рис. 3.14. Ввод параметров дифференциального уравнения Зададим параметры решения и начальные условия - исходную деформацию пластины при t = 0:
Для этого воспользуемся диалоговым окном " Solve Parameters", которое можно открыть, выбрав пункты меню Solve—> Parameters... (рис. 3.15).
Рис. 3.15. Ввод параметров решения
Вначале выберем шаг, и верхний предел решения по времени. Для параметра Time введем строку " 0: 0.1: 10". Таким образом, расчет будет выполняться по времени в пределах; = 0...10 с шагом Начальные условия также записываются с учетом особенностей языка пакета MATLAB. Начальная деформация указывается строкой " atan(cos(pi*x/2))", а первая производная " 3*sin(pi*x).*exp(sin(pi*y/2))". Относительную и абсолютную погрешность примем равными 0, 01 и 0, 001. сохранив установленные по умолчанию значения. Сформируем сетку и настроим графические параметры решения с помощью диалогового окна " Plot Selection" (рис. 3.16).
Рис. 3.16. Параметры анимации Завершающий этап - запуск решения задачи. После окончания вычислений в графическом окне интерфейса PDETool отображается деформация пластины в момент времени t = 10, а в дополнительном окне - анимация колебаний пластины (рис. 3.17).
Рис. 3.17. Анимация решения гиперболического уравнения
Объекты исследования. 1. Поплавковые инерциальные датчики: с цилиндрическим подвесом; со сферическим подвесом. 2. Роторные вибрационные динамически настраиваемые инерциальные датчики. 3. Электростатические сферические инерциальные датчики в вариантах: гировертикали и гироскопа направления. 4. Волновые твердотельные инерциальные датчики. 5. Микромеханические инерциальные датчики в вариантах: камертонный микромеханический гироскоп; микромеханический гироскоп с кардановым подвесом чувствительного элемента; микромеханический гироскоп с дополнительной рамкой и поступательным движением чувствительного элемента. 6. Волоконно-оптические инерциальные датчики. 7. Лазерные инерциальные датчики. Содержание курсовой работы. 1. Формулировка задания и краткая теория исследуемого инерциального датчика. 2. Принципиальная и (или) кинематическая схемы инерциального датчика. 3. Математические модели идеальной работы и модели погрешностей инерциального датчика. 4. Анимация принципа действия инерциального датчика. 5. Создание и описание пользовательского графического интерфейса в Matlab и методики исследований. 6. Моделирование поведения (свободных и вынужденных движений) инерциального датчика в среде Simulink с визуализацией. 7. Анализ динамических и частотных характеристик в ППП Control System Toolbox пакета Matlab с визуализацией. 8. Задачи исследования с окном приложения i_termo в процессе вывода результатов исследования: 8.1. Исследование конвективных потоков уводящих моментов в цилиндрическом зазоре поплавкового гироскопического датчика; определение демпфирующих моментов в цилиндрическом и сферическом зазоре поплавковых гироскопических датчиков. 8.2. Расчет, анализ и визуализация трехмерных неоднородных температурных полей роторного вибрационного гироскопического датчика. 8.3. Исследование температурных погрешностей электростатического сферического инерциального датчика. 8.4. Исследование процесса распространения тепла в полусферическом резонаторе ВТГ; исследование температурных деформаций полусферического резонатора ВТГ. 8.5. Определение температурных погрешностей микромеханического инерциального датчика в вариантах: камертонный микромеханический гироскоп; микромеханический гироскоп с кардановым подвесом чувствительного элемента; микромеханический гироскоп с дополнительной рамкой и поступательным движением чувствительного элемента. 8.6. Оценка теплового дрейфа, обусловленного термически индуцированной невзаимностью в волоконном контуре волоконно-оптического инерциального датчика. 8.7. Исследование погрешностей лазерного инерциального датчика. Упругим подвесом ротора Схема этого прецессионного ДНГ, работающего в режиме измерения угловых скоростей, представлена на рис. 5.4. На основании 1 установлен приводной двигатель 2, на валу 3 которого с помощью внутреннего упругого карданного подвеса укреплен ротор 4. Карданный подвес составлен идентичными кольцами 5, 6, параллельно соединенными с валом и ротором упругими элементами 7, 8, 9, 10. При этом кольцо 5 соединено с валом упругим элементом 7, а с ротором – элементом 8; кольцо 6 соединено с валом упругим элементом 9, а с ротором - элементом 10. С основанием связана система координат Рассмотрим качественную картину измерения ДНГ-ДУС компонент
(Јx+Јxk )γ ״ -(Јy+2Јxk)Ω δ ׳ +kγ ׳ +(c-(2Јxk-Јyk)Ω 2)γ -kΩ δ = (Јy+Јyk)Ω ω ζ -(Јx+Јxk)ω ׳ ζ +Μ ДМζ +Μ Вζ ; (5.16) (Јx+Јxk )δ ״ +(Јy+2Јxk )Ω γ ׳ + kδ ׳ + (c-(2Јxk-Јyk )Ω 2)δ -kΩ γ = -(Јy+Јyk )Ω ω ζ -(Јx+Јxk )ω ׳ ζ +Μ ДМζ +Μ Вζ ,
где
где Отличительной особенностью уравнений (5.16) по сравнению с уравнениями (5.6) является отсутствие в правой части (5.16) гармонических членов на частоте c-(2Јxk-Јyk)Ω 2=0 (5.18) Физическая суть этого условия заключается в компенсации приложенных к ротору моментов сил упругости Будем полагать, что основание, на котором установлен гироскоп, не вращается (ω ξ =ω ζ =0), а возмущающие и компенсационные моменты отсутствуют (Μ Вξ =Μ Вζ =0, Μ ДМξ =Μ ДМζ =0). Будем полагать также, что отсутствует угол поворота ротора относительно основания вокруг оси Оξ на угол δ (δ =0), а угол поворота вокруг оси Оξ равен γ. На рисунке 5.5 представлена соответствующая рисунку 5.4 схема ротора ДНГ с двумя кольцами (рамками) подвеса и соединяющими их упругими элементами. По аналогии с (5.1) имеет место соотношение: α -jβ =(γ -jδ )e-jΩ t. Отсюда, при δ =0 получим α =γ cosΩ t, β =γ sinΩ t, (5.19) где α и β – углы поворота ротора вокруг осей торсионов. Определим сначала проекции на оси Оξ и Оς моментов сил упругости Мупрξ , Мупрζ , приложенных к ротору со стороны упругих элементов. Проекции этих моментов на оси x и z таковы (рис.5.5) Мупрx=-cα, Мупрz=-cβ. (5.20) Соответственно проекции моментов сил упругости на оси Оξ и Оζ имеют вид: Мупрξ =-cα cosΩ t-cβ sinΩ t, Мупрζ =cα sinΩ t-cβ cosΩ t. (5.21) Подставляя в (5.21) соотношения (5.19), получим Мупрξ =cγ, Мупрζ =0 (5.22) Таким образом, дискретные упругие элементы вращающегося внутреннего карданного подвеса создают такой же Мупрξ , как если бы ротор был связан с валом сплошной упругой мембраной. Определим теперь проекции на оси Оξ и Оζ моментов сил инерции Минξ , Минζ , приложенных к ротору со стороны колец 5, 6 через связи-упругие элементы. Со стороны кольца 5 на ротор могут передаваться моменты сил инерции только по оси Ox потому, что моменты, направленные по оси Oz, парируются моментами реакции в элементах 7 (см. рис.5.4), соединяющих это кольцо с валом и обладающих практически бесконечной жесткостью на изгиб вокруг оси Oz. Аналогично со стороны кольца 6 на ротор могут передаваться моменты сил инерции только по оси Oz. На рисунке 5.5 с учетом малости углов α , β обозначены: Јxkα ״ и Јxkβ ״ – моменты сил инерции, порождаемые угловыми ускорениями колец и приложенные к ротору по осям Ox и Oz соответственно; Ω α и Ω β – проекции угловой скорости вращения вала Ω на оси Oz и Ox соответственно; ЈxkΩ β и ЈxkΩ α - компоненты моментов количества движения колец по осям x и z за счет Ω β и Ω α. С учетом наличия у каждого из колец моментов количества движения также и по оси Oy, равного ЈykΩ, на рисунке 5.5 обозначены гироскопические моменты по оси Ox - ЈxkΩ 2α, порождаемый ЈxkΩ α иΩ , и ЈykΩ 2α, порождаемый ЈykΩ и Ω α, а также гироскопические моменты по оси Oz - ЈxkΩ 2β, порождаемый ЈxkΩ β и Ω, и ЈykΩ 2β, порождаемый ЈykΩ и Ω β. Суммарные моменты сил инерции Минx и Минz, приложенные к ротору таковы: Минx= ЈxkΩ 2α ЈykΩ 2α Јxkα ״ , (5.23) Минz= ЈxkΩ 2β ЈykΩ 2β Јxkβ ״ . Учетом (5.19) при условии постоянства угла γ, что в значительной мере справедливо для практически свободного гироскопа. (5.23) принимает вид: Минx= (2Јxk Јyk)Ω 2γ cosΩ t, (5.24) Минz= (2Јxk Јyk)Ω 2γ sinΩ t. Проекции Минξ , Минζ моментов сил инерции, приложенных к ротору: Минξ = МинxcosΩ t+ МинzsinΩ t, (5.25) Минζ = МинzcosΩ t МинxsinΩ t. Из (5.25) с учетом (5.24) получим: Минξ =(2Јxk Јyk)Ω 2γ, Минζ =0 (5.26) Как следует из (5.26), моменты сил инерции колец подвеса, приложенные к ротору ДНГ, имеют характер позиционных моментов. Условие отсутствия упругой связи ротора с основанием – условие равенства нулю суммы моментов сил упругости (5.22) и моментов сил инерции (5.26). Оно имеет вид: c(2Јxk Јyk)Ω 2γ =0 (5.27) и совпадает с условием динамической настройки (5.18). Полагая, что выбором вида и параметров передаточной функции
где Тогда, имея ввиду, что K0> > kΩ , для выходных сигналов
где Укажем теперь основные источники погрешностей ДНГ-ДУС [5.5, 5.6]. Из (5.16) непосредственно следует, что основные методические погрешности гироскопа определяются диссипативными моментами Инструментальные погрешности гироскопа, которые порождают смещение его нуля (дрейф) и нестабильность масштабного коэффициента, определяются динамической расстройкой (нарушение условия (5.18)) и возмущающими моментами
где nξ , nη , nζ - компоненты перегрузок по осям основания Моменты, не зависящие от перегрузки, порождаются пондеромоторными силами воздействия сторонних магнитных полей на ферромагнитные элементы ротора и силами воздействия электрических полей, например, на элементы измерительных преобразователей, силами газодинамической природы, воздействующими на ротор, влиянием привода. Моменты, зависящие от первой степени перегрузки и нормальные к ней, порождаются гравиинерциальными силами при наличии смещения центра масс ротора относительно неподвижной точки подвеса. Квадратурные моменты возникают вследствие технологического несовершенства упругого подвеса, в частности вследствие непересечения его осей; моменты, пропорциональные произведению перегрузок, порождаются неравножесткостью конструкции подвеса ротора в осевом и радиальном направлениях. Отнесенные к кинетическому моменту Высокий уровень метрологических характеристик ДНГ-ДУС можно обеспечить на основе использования этой или других адекватных моделей дрейфов [5.5, 5.6] путем предварительной калибровки и уточнения их параметров в процессе движения объекта [5.5, 5.11]. В таблице 5.1 представлены основные характеристики ряда серийно выпускаемых ДНГ-ДУС [5.7, 5.12, 5.13]. Эффект Саньяка. Рассмотрим распространение двух встречных электромагнитных волн λ 1, λ 2 по замкнутому оптическому контуру (рис.5.6). Волны генерируются источником на контуре, расположенном в точке А. Контур вращается вокруг оси, перпендикулярной его плоскости и проходящей через центр О, с угловой скоростью Ω. После обхода контура в противоположных направлениях волны интерферируют, причем при вращении контура интерференционная картина сдвигается, и величина сдвига пропорциональна скорости вращения. Этот факт свидетельствует о том, что оптический путь, пройденный волнами по замкнутому контуру - разный; соответственно и времена полного обхода вращающегося контура разные. Определим эти параметры на основе упрощенного кинематического подхода. Выберем на контуре малый участок BC=dl. Пока волна λ 1 идет из точки B в точку С эта точка переместится в точку D, причем CD=dx. Перемещение dx, в свою очередь, определяется соотношением: dx= vτ, (5.31) где v- окружная линейная скорость участка BC; τ - время движения электромагнитной волны λ по участку BD v=rΩ, τ =dl/c, (5.32) где r - расстояние участка BC до центра вращения; c - скорость света. Отсюда
Соотношение(5.33) определяет приращение элементарного оптического пути dl. Приращение же Δ L оптического пути при обходе волной λ 1 контура (изменение длины периметра) равно сумме приращений на отдельных участках и составляет:
(5.34)
где L - оптический путь волны в невращающемся контуре (оптический периметр контура).
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 744; Нарушение авторского права страницы
 При этом на экране монитора отображается главное окно приложения (рис. 3.18).
При этом на экране монитора отображается главное окно приложения (рис. 3.18).




 Рис. 3.23. Задание граничных условий на правой границе
Рис. 3.23. Задание граничных условий на правой границе

 осуществляется за счет активизации кнопки с символом Δ (рис. 2.27). При необходимости увеличения числа узлов сетки следует активизировать кнопку
осуществляется за счет активизации кнопки с символом Δ (рис. 2.27). При необходимости увеличения числа узлов сетки следует активизировать кнопку  (рис. 3.28).
(рис. 3.28).
 , после чего в появившемся окне редактирования параметров изображения внести в соответствующие поля данные, как показано на рис. 3.30.
, после чего в появившемся окне редактирования параметров изображения внести в соответствующие поля данные, как показано на рис. 3.30. При активизации кнопки Plot на экран будет выведен график, показанный
При активизации кнопки Plot на экран будет выведен график, показанный


 Пусть необходимо решить задачу о нестационарном распределении температуры в медном стержне прямоугольного профиля длиной 20 см, шириной 1 см (плотность 8900 кг/м3, удельная теплоемкость 380 Дж/(кг⋅ К), коэффициент теплопроводности 385 Вт/(м⋅ К))на промежутке времени 10 с при условии отсутствия источников и стоков тепла в объеме стержня, если температура на концах стержня равна 300 К и тепловой поток через боковые границы равен нулю для начального распределения температуры, показанного на рис. 3.33.
Пусть необходимо решить задачу о нестационарном распределении температуры в медном стержне прямоугольного профиля длиной 20 см, шириной 1 см (плотность 8900 кг/м3, удельная теплоемкость 380 Дж/(кг⋅ К), коэффициент теплопроводности 385 Вт/(м⋅ К))на промежутке времени 10 с при условии отсутствия источников и стоков тепла в объеме стержня, если температура на концах стержня равна 300 К и тепловой поток через боковые границы равен нулю для начального распределения температуры, показанного на рис. 3.33.



 при заданных начальных условиях: u(x; 0)=3x(1-x)+0.12;
при заданных начальных условиях: u(x; 0)=3x(1-x)+0.12;  [0; 0.6].
[0; 0.6]. .
.




 t=0, 1.
t=0, 1.
 (начало
(начало  - в точке пересечения осей вала и упругих элементов, ось
- в точке пересечения осей вала и упругих элементов, ось  - ось вращения вала); с ротором связана система координат
- ось вращения вала); с ротором связана система координат  (оси
(оси  расположены в экваториальной плоскости ротора и направлены по осям закрутки упругих элементов 10 и 8 соответственно). Поворот ротора относительно вала вокруг оси
расположены в экваториальной плоскости ротора и направлены по осям закрутки упругих элементов 10 и 8 соответственно). Поворот ротора относительно вала вокруг оси  на малый угол
на малый угол  осуществляется при закрутке упругих элементов 10 и 7, а поворот ротора на малый угол
осуществляется при закрутке упругих элементов 10 и 7, а поворот ротора на малый угол  вокруг оси
вокруг оси  - при закрутке упругих элементов 8 и 9. При этом жесткость на изгиб упругих элементов не бесконечно велика, поскольку в силу особенностей кинематики схемы при одновременном движении ротора по углам
- при закрутке упругих элементов 8 и 9. При этом жесткость на изгиб упругих элементов не бесконечно велика, поскольку в силу особенностей кинематики схемы при одновременном движении ротора по углам  и, следовательно, изгиб упругих элементов в плоскости
и, следовательно, изгиб упругих элементов в плоскости  [5.5]. На рисунке 5.4 обозначены измерительные преобразователи 11, 12, осуществляющие измерение углов
[5.5]. На рисунке 5.4 обозначены измерительные преобразователи 11, 12, осуществляющие измерение углов  и
и  поворота ротора относительно основания соответственно вокруг осей
поворота ротора относительно основания соответственно вокруг осей  и
и  , а также преобразователи моментов 13, 14, обеспечивающие формирование перекрестных компенсационных моментов, воздействующих на ротор соответственно вокруг осей
, а также преобразователи моментов 13, 14, обеспечивающие формирование перекрестных компенсационных моментов, воздействующих на ротор соответственно вокруг осей  .
. угловой скорости основания. Будем полагать, что плоскость
угловой скорости основания. Будем полагать, что плоскость  . Будем полагать также, что кольца подвеса также динамически симметричны и имеет место равенство их экваториальных главных моментов инерции Јxk=Јzk. Тогда, опуская возмущающие моменты, приложенные к ротору, пренебрегая в силу малости влиянием компоненты
. Будем полагать также, что кольца подвеса также динамически симметричны и имеет место равенство их экваториальных главных моментов инерции Јxk=Јzk. Тогда, опуская возмущающие моменты, приложенные к ротору, пренебрегая в силу малости влиянием компоненты  угловой скорости вращения основания (рис. 5.4), а также изгибными деформациями упругих элементов, и учитывая малость углов
угловой скорости вращения основания (рис. 5.4), а также изгибными деформациями упругих элементов, и учитывая малость углов  - угловая скорость вращения вала приводного двигателя; Јy, Јyk - осевые моменты инерции ротора и колец; k, c - приведенные коэффициенты момента сил вязкого трении и угловой жесткости упругих элементов на кручение;
- угловая скорость вращения вала приводного двигателя; Јy, Јyk - осевые моменты инерции ротора и колец; k, c - приведенные коэффициенты момента сил вязкого трении и угловой жесткости упругих элементов на кручение;  и
и  - компенсационные и возмущающие моменты, воздействующие на ротор вокруг осей
- компенсационные и возмущающие моменты, воздействующие на ротор вокруг осей  соответственно.
соответственно. (5.17)
(5.17) - коэффициент усиления и передаточная функция компенсационного канала.
- коэффициент усиления и передаточная функция компенсационного канала. 
 , что определяется свойствами этого гироскопа как прецессионного гироскопа. Позиционные моменты в левой части (5.16) могут быть устранены при выполнении условия динамической настройки:
, что определяется свойствами этого гироскопа как прецессионного гироскопа. Позиционные моменты в левой части (5.16) могут быть устранены при выполнении условия динамической настройки:  и
и  , создаваемых упругими элементами, соответствующими динамическими моментами сил инерции (2Јxk-Јyk)Ω 2γ и (2Јxk-Јyk)Ω 2δ , развиваемыми кольцами подвеса ротора. При этом гироскоп становится практически свободным. Рассмотрим этот вопрос более подробно на частном примере.
, создаваемых упругими элементами, соответствующими динамическими моментами сил инерции (2Јxk-Јyk)Ω 2γ и (2Јxk-Јyk)Ω 2δ , развиваемыми кольцами подвеса ротора. При этом гироскоп становится практически свободным. Рассмотрим этот вопрос более подробно на частном примере. обеспечивается необходимое динамическое качество ДНГ как измерителя угловой скорости, из (5.16) с учетом (5.17), (5.18) и малости Јyk по сравнению с Јy (Јyk< < Јy) при квазипостоянных
обеспечивается необходимое динамическое качество ДНГ как измерителя угловой скорости, из (5.16) с учетом (5.17), (5.18) и малости Јyk по сравнению с Јy (Јyk< < Јy) при квазипостоянных  получим:
получим:  (5.28)
(5.28) - кинетический момент гироскопа.
- кинетический момент гироскопа. (5.29)
(5.29) - коэффициент передачи преобразователя моментов по напряжению.
- коэффициент передачи преобразователя моментов по напряжению. и
и  , а также моментами сил инерции (Јx+Јxk)ω ׳ ζ , (Јx+Јxk)ω ׳ ζ , порождаемыми ускоренным вращением основания.
, а также моментами сил инерции (Јx+Јxk)ω ׳ ζ , (Јx+Јxk)ω ׳ ζ , порождаемыми ускоренным вращением основания. и
и  . Основными причинами динамической расстройки являются нестабильность
. Основными причинами динамической расстройки являются нестабильность  (5.30)
(5.30) ; М0ξ , М0ζ - моменты, не зависящие от перегрузок;
; М0ξ , М0ζ - моменты, не зависящие от перегрузок;  - удельные, отнесенные к единице перегрузки, весовые коэффициенты моментов, пропорциональных первой степени перегрузки и нормальных к ней;
- удельные, отнесенные к единице перегрузки, весовые коэффициенты моментов, пропорциональных первой степени перегрузки и нормальных к ней;  - удельные, отнесенные к единице перегрузки, весовые коэффициенты квадратурных моментов, пропорциональных первой степени перегрузки и коллинеарных ей;
- удельные, отнесенные к единице перегрузки, весовые коэффициенты квадратурных моментов, пропорциональных первой степени перегрузки и коллинеарных ей;  - удельные, отнесенные к произведению единичных перегрузок весовые коэффициенты моментов, пропорциональных произведению перегрузок.
- удельные, отнесенные к произведению единичных перегрузок весовые коэффициенты моментов, пропорциональных произведению перегрузок. гироскопа моменты (5.30) определяют вариант модели дрейфов ДНГ-ДУС. Параметры этой модели в свою очередь зависят от температуры. Вариации температуры относительно номинальной порождают также изменение крутизны измерительных преобразователей углов и, что весьма существенно, крутизны
гироскопа моменты (5.30) определяют вариант модели дрейфов ДНГ-ДУС. Параметры этой модели в свою очередь зависят от температуры. Вариации температуры относительно номинальной порождают также изменение крутизны измерительных преобразователей углов и, что весьма существенно, крутизны 

 Полагая в первом приближении, что произведение rdl равно удвоенной площади ∆ Ѕ треугольника OBC (5.6), а равен соответственно удвоенной площади S, охватываемой оптическим контуром, из (5.34) получим:
Полагая в первом приближении, что произведение rdl равно удвоенной площади ∆ Ѕ треугольника OBC (5.6), а равен соответственно удвоенной площади S, охватываемой оптическим контуром, из (5.34) получим: 