|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Постановка задачи оптимального управления
Если состояние какой-либо системы, в том числе экономической, может изменяться под влиянием управляющих воздействий и необходимо подавать эти воздействия таким образом, чтобы управлять системой наилучшим образом, возникает задача оптимального управления. Эта задача является частным случаем общей задачи оптимизации. Определим некоторые ключевые понятия, необходимые для описания задачи оптимального управления. Будем считать, что состояние системы в любой момент времени может быть описано вектором Последовательность состояний системы во времени Независимая переменная Будем считать, что управляющие воздействия могут быть заданы с помощью вектора На состояние системы Пару функций
где
Для определенности будем считать момент начала процесса равным нулю ( Определим состояние, в котором система находится в начальный момент времени:
Если на промежутке
Решив систему дифференциальных уравнений (3) с учетом условия (2), можно найти траекторию В дискретном случае модель задается в виде системы рекуррентных уравнений:
Или в векторной форме:
Аргумент процесса В дискретной системе, так же как и в непрерывной, программа управления
Затем найдем
...
Так по заданному управлению Процессы Для постановки оптимизационной задачи необходимо ввести в рассмотрение функционал Функционал В социально-экономических задачах сложно выделить какой-либо один критерий управления. Для решения многокритериальных задач используются различные методы, например, иногда выводится один главный критерий, а остальные критерии добавляются в качестве ограничений (то есть значение критерия не должно превышать определенной величины, таким образом, множество M сужается). Иногда критерии свертываются в один с помощью весовых коэффициентов. В задаче оптимального управления для непрерывных систем обычно рассматривают функционалы вида:
где:
Первое слагаемое (5) оценивает качество процесса на промежутке Для задачи оптимизации дискретных процессов в формуле функционала
Существуют такие постановки задачи, когда момент времени
Примеры моделей управляемых процессов
Рассмотрим пример задачи оптимального управления. Модель Леонтьева задается выражением:
Рассмотрим эту модель на некотором промежутке времени
Необходимо также учесть начальное состояние системы и ограничения на минимальную и максимальную величину потребления. Кроме того, из экономического смысла модели вытекает требование неотрицательности переменных.
В качестве критерия развития экономики возьмем суммарное дисконтированное потребление на всем периоде планирования и экономический потенциал на конец этого периода. Функционал
Здесь Рассмотрим теперь задачу построения траектории процесса по заданному управлению. Пусть на промежутке
Начальные условия:
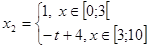
При этом управление задано кусочно-непрерывной функцией:
По заданным управлению и начальному состоянию требуется построить траекторию управляемой системы на участке Очевидно, что имеется два участка [0; 3[ и [3; 10] на которых u(t) непрерывна. Для участке
Решаем второе уравнение методом прямого интегрирования:
где C2 - произвольная постоянная. Подставим теперь выражение для x2 в первое уравнение и найдем x1:
Получено общее решение системы дифференциальных уравнений. Для того, чтобы найти частное решение, подставим в общее решение начальные условия
Таким образом, частное решение системы с учетом начальных значений примет вид:
В точке t=3 состояние системы будет описано двумя числами: x1(3)=12, x2(3)=1. Рассмотрим теперь участок траектории
Также решив второе уравнение и подставив результат в первое, получим общее решение системы:
Итак, общее решение:
К моменту времени t=3 система окажется в точке x1(3)=10, x2(3)=3. Начало второго участка совпадает с концом первого. Подставив эти значения получим частное решение:
Частное решение:
Таким образом, окончательно искомая траектория будет иметь вид:
На рисунке 5 показана построенная траектория.
Рисунок 5 – Траектория управляемого процесса Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1524; Нарушение авторского права страницы
 , где
, где  - n-мерное пространство. В этом случае пространство
- n-мерное пространство. В этом случае пространство  называют траекторией системы.
называют траекторией системы. называется аргументом процесса. В качестве аргумента процесса может выступать любая величина. В нашем случае t - это время. Переменная
называется аргументом процесса. В качестве аргумента процесса может выступать любая величина. В нашем случае t - это время. Переменная  , или отрезок натурального ряда
, или отрезок натурального ряда  . В случае с числовой прямой процессы, происходящие в системе, рассматриваются как непрерывные, а в случае натурального ряда – как дискретные или многошаговые.
. В случае с числовой прямой процессы, происходящие в системе, рассматриваются как непрерывные, а в случае натурального ряда – как дискретные или многошаговые.
 - мерного векторного пространства
- мерного векторного пространства  . Вектор-функция
. Вектор-функция  называется программой управления.
называется программой управления. и на управление
и на управление  накладываются ограничения:
накладываются ограничения:  , где
, где  - некоторое подпространство
- некоторое подпространство  -мерного пространства. Ограничения на
-мерного пространства. Ограничения на  .
. называют процессом. Связь между функциями
называют процессом. Связь между функциями  ,
,  - обозначение производной xi по t. Модель может также быть представлена в векторной форме:
- обозначение производной xi по t. Модель может также быть представлена в векторной форме: 
 =0). Если
=0). Если  . Момент окончания процесса
. Момент окончания процесса  примем равным
примем равным  . Аргумент процесса, таким образом, изменяется в переделах
. Аргумент процесса, таким образом, изменяется в переделах  .
.

 , которая соответствует заданному уравнению
, которая соответствует заданному уравнению  . Задавая различные законы управления
. Задавая различные законы управления 

 . Начальное состояние будем считать равным
. Начальное состояние будем считать равным  .
. состояние
состояние  :
:  .
. , подставив найденное значений
, подставив найденное значений  и т.д.
и т.д.


 можно однозначно определить траекторию системы.
можно однозначно определить траекторию системы. , которые удовлетворяют уравнениям модели процесса (3) или (4), заданным начальным условиям (2) и ограничениям на состояние и управление
, которые удовлетворяют уравнениям модели процесса (3) или (4), заданным начальным условиям (2) и ограничениям на состояние и управление  называются допустимыми процессами. Обозначим множество допустимых процессов через M.
называются допустимыми процессами. Обозначим множество допустимых процессов через M. , заданный на множестве
, заданный на множестве  . Задача оптимального управления состоит в выборе элемента
. Задача оптимального управления состоит в выборе элемента  множества
множества  - оптимальным управлением, а траектория
- оптимальным управлением, а траектория  - оптимальной траекторией.
- оптимальной траекторией. , то это может быть достигнуто минимизацией функционала -
, то это может быть достигнуто минимизацией функционала -  ,
,
 и
и  - заданные функции.
- заданные функции. , а второе слагаемое (так называемая, терминальная составляющая) оценивает качество состояния системы в конечный момент времени (t=T). Иногда конечное состояние системы
, а второе слагаемое (так называемая, терминальная составляющая) оценивает качество состояния системы в конечный момент времени (t=T). Иногда конечное состояние системы  задается заранее. В этом случае терминальная составляющая исключается из функционала (5), а условие
задается заранее. В этом случае терминальная составляющая исключается из функционала (5), а условие 
 окончания процесса не задан заранее, а выступает в качестве критерия управления. Такие задачи называются задачами на быстродействие. Они используются тогда, когда требуется перевести систему из заданного начального состояния
окончания процесса не задан заранее, а выступает в качестве критерия управления. Такие задачи называются задачами на быстродействие. Они используются тогда, когда требуется перевести систему из заданного начального состояния 
 . Будем считать валовой продукт X эндогенной переменной, а потребление C - экзогенной. Если задать потребление как функцию от времени
. Будем считать валовой продукт X эндогенной переменной, а потребление C - экзогенной. Если задать потребление как функцию от времени  на промежутке
на промежутке  . Запишем (8) в виде:
. Запишем (8) в виде: 


 - функция дисконтирования, которая позволяет привести потребление к одному моменту времени. Весовые коэффициенты
- функция дисконтирования, которая позволяет привести потребление к одному моменту времени. Весовые коэффициенты  позволяют расставить приоритеты между двумя целями планирования.
позволяют расставить приоритеты между двумя целями планирования. дана модель управляемого процесса в виде системы дифференциальных уравнений:
дана модель управляемого процесса в виде системы дифференциальных уравнений: 


 подставим значение u=0. Получим систему дифференциальных уравнений:
подставим значение u=0. Получим систему дифференциальных уравнений: 

 :
:  , откуда
, откуда 

 . Здесь управление задается выражением u=-1. Подставив это выражение в исходную систему, получим:
. Здесь управление задается выражением u=-1. Подставив это выражение в исходную систему, получим: