
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Разложение импульсной переходной функции по заданной системе базисных функций. ⇐ ПредыдущаяСтр 8 из 8
Подставим выражение для импульсной характеристики в исходную регрессионную модель.
где Это линейно-комбинационная динамическая регрессионная модель. Известными параметрами данной модели являются следующие коэффициенты:
Данная модель в целом нелинейно-параметризованная (по параметрам Возможны два способа построения линейно-комбинационной модели: Построение модели при известном значении параметра Предположим, что параметр
МНК-оценка вектора
Преимуществом этого метода является использование точной по структуре динамической регрессионной модели. Если входной сигнал не является кусочно-постоянной функцией, то можно либо его аппроксимировать кусочно-постоянной функцией и использовать точную линейно-комбинационную модель, либо использовать неточную динамическую регрессионную модель соответствующую разложению импульсной переходной функции. Построение модели при неизвестном значении параметра Предположим, что параметр
В случае нелинейной параметризации Представим модель в виде скалярного произведения:
но Для получения оценки вектора неизвестных параметров метод наименьших квадратов непригоден, необходимо использовать методы нелинейного оценивания, например, метод Гаусса-Ньютона. В дальнейшем будем вычислять оценки вектора неизвестных параметров этим методом: 1. находим начальное приближение вектора неизвестных параметров
2. разложим модель в ряд Тейлора: Отсюда найдем первое приближение: Запишем в общем виде:
Объекты и средства исследования Объекты исследования – динамические регрессионные модели ординат и линейно-комбинационная модель. Подготовка к работе 4.1. Изучить соответствующие разделы конспекта лекций
5.1. Получить вариант у преподавателя. 5.2. Составить алгоритм и программу вычисления оценок неизвестных параметров ДРМ. 5.3. Отладить программу и вывести на печать результаты моделирования. 6. Контрольные вопросы 6.1. Что такое динамическая регрессионная модель? 6.2. Вывести структуру ДРМ ординат и линейно-комбинационной модели для кусочно-постоянного входного сигнала. 6.3. Какие методы оценивания применимы для построения моделей ординат и линейно-комбинационной модели? 6.4. Сколько этапов моделирования используется при построении нелинейно-параметризованной линейно-комбинационной модели?
ЛАБОРАТОРНАЯ РАБОТА N11 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ ПЛАНИРОВАНИЯ ЭКСПЕРИМЕНТА 1. Цель работы: Изучение основных идей, понятий и определений теории планирования эксперимента, знакомство с критериями оптимальности планов и моделей. Основы теории Пусть объект управления представлен схемой на рис 1.
Рис. 1 Структура модели данного объекта является линейно-параметризованной:
МНК-оценка вектора неизвестных коэффициентов определяется по формуле
Качество модели характеризуется ковариационной матрицей следующей структуры:
В случае линейной параметризации модели информационная матрица определяется на основе измерений входных переменных объекта (то есть информационная матрица определяется матрицей входных переменных В случае линейной параметризации модели имеется возможность так спланировать эксперимент, то есть определить такую матрицу входных переменных, при которой ковариационная матрица оценок неизвестных параметров обладает теми или иными желаемыми свойствами. При пассивном эксперименте, когда матрица входных переменных является во многом случайной, ковариационная матрица оценок чаще всего является плохо обусловленной (то есть ее детерминант близок к нулю). Поэтому планирование эксперимента, то есть активное экспериментирование, когда входные переменные не просто измеряются, а устанавливаются на некоторых оптимальных уровнях, позволяет получить модели, обладающие теми или иными оптимальными свойствами. Основными понятиями теории планирования эксперимента являются: - факторы планирования; - пространство планирования; - план эксперимента; - критерии оптимальности планов и моделей. Факторами планирования будем называть управляемые входные переменные
Пространство планирования Рис. 2 Для большинства известных планов областью планирования являются либо единичный n-мерный гиперкуб, либо единичная гиперсфера. План эксперимента (ε ) - это совокупность точек пространства планирования, в которых производятся опыты.
Спектр («скелет плана») - это совокупность неповторяющихся точек пространства планирования, в которых производятся опыты. Частота повторения наблюдений в i-ой точке определяется по формуле
где
Планы делятся на точные и непрерывные. План называется точным, если в нем все точно известно, то есть общее число опытов и число опытов в i-ой точке плана известны и являются целыми величинами. План называется непрерывным или асимптотическим, если для заданного значения общего числа опытов не все значения числа опытов в i-ой точке являются целыми величинами. Если для данного значения числа опытов план не является точным, то его необходимо округлить до ближайшего точного плана притом же общем числе опытов, либо изменить общее число опытов. Каждый план и полученная на его основе регрессионная модель должны удовлетворять соответствующему критерию оптимальности. Критерии оптимальности делятся на две группы. К первой группе относятся критерии, характеризующие точность оценок неизвестных параметров модели; ко второй - критерии, характеризующие предсказательные свойства, полученной на основе плана модели регрессии. Первая группа критериев оптимальности: 1) критерий ортогональности, 2) D-оптимальность, 3) A-оптимальность и т.д. Вторая группа критериев оптимальности: 1) рототабельность, 2) G-оптимальность, 3) Q-оптимальность и т.д. План называется ортогональным, если соответствующая ему ковариационная матрица оценок параметров модели является диагональной:
Ортогональный план обеспечивает некоррелированность МНК - оценок неизвестных параметров модели. План называется D-оптимальным, если он минимизирует определитель ковариационной матрицы оценок, то есть Критерий D-оптимальности обеспечивает минимизацию объема эллипсоида рассеивания оценок параметров модели или обобщенную дисперсию оценок. Например, для модели вида
Внутри эллипса находится точка с координатами, равными истинным значениям неизвестных параметров модели. Объем эллипсоида рассеивания прямо пропорционален определителю ковариационной матрицы. А-оптимальность. План называется А-оптимальным, если он минимизирует след ковариационной матрицы оценок неизвестных параметров:
Критерий А-оптимальности минимизирует сумму дисперсий оценок неизвестных параметров. Недостаток данного критерия состоит в том, что он не учитывает коррелированность оценок неизвестных параметров. Вторую группу критериев оптимальности составляют критерии, обеспечивающие те или иные свойства дисперсионной функции регрессионной модели. Дисперсионная функция определяет зависимость дисперсии предсказания выхода по модели от координат точки предсказания. Например, для модели
План называется рототабельным, если дисперсия предсказания выхода по соответствующей ему модели зависит только от расстояния точки предсказания от центра области планирования и не зависит от направления предсказания, то есть в точках равноудаленных от центра области планирования дисперсия предсказания одинакова. Критерий рототабельности удобен, если получаемая регрессионная модель используется при статической оптимизации параметров или режимов объектов. При этом предполагается, что оптимизация осуществляется поисковыми методами. План называется G-оптимальным или минимаксным, если он минимизирует максимальную по пространству планирования дисперсию предсказания выхода (рис. 4).
Рис. 4
Максимальная дисперсия должна быть минимальна по пространству планирования, Существует теорема эквивалентности, согласно которой для линейно-параметризованных моделей критерии D- и G-оптимальности эквивалентны. То есть D-оптимальный план является G-оптимальным и наоборот. План называется Q-оптимальным, если он минимизирует среднюю по пространству планирования дисперсию предсказания выхода. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 759; Нарушение авторского права страницы


 - коэффициент разложения,
- коэффициент разложения,  - параметр затухания.
- параметр затухания.
 в линейно-комбинационную модель, то получим линейно-параметризованную модель:
в линейно-комбинационную модель, то получим линейно-параметризованную модель: 
 имеет вид
имеет вид 
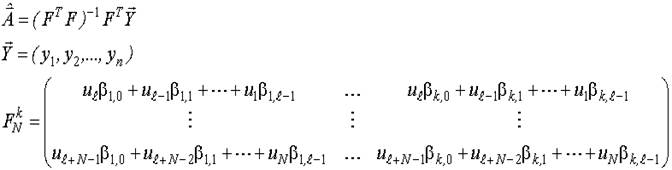 Введем матрицы:
Введем матрицы: 


 ,
, 

 - МНК-оценка коэффициента разложения.
- МНК-оценка коэффициента разложения.
 и так далее.
и так далее.
 - правило останова
- правило останова



 ) и не зависит от значений выхода, полученных по результатам эксперимента.
) и не зависит от значений выхода, полученных по результатам эксперимента.
 - это область в n-мерном пространстве, внутри и на границах которой можно проводить опыты (рис. 2). Область планирования может быть правильной и произвольной формы.
- это область в n-мерном пространстве, внутри и на границах которой можно проводить опыты (рис. 2). Область планирования может быть правильной и произвольной формы. 
 и частотами повторений наблюдений в точках спектра
и частотами повторений наблюдений в точках спектра  .
.

 ;
;  - число опытов в i-ой точке спектра;
- число опытов в i-ой точке спектра;  - общее число опытов, предусмотренных планом.
- общее число опытов, предусмотренных планом.

 в результате многократного повторения идентификации получим точки, попадающие в область, ограниченную эллипсом рассеивания (рис. 3).
в результате многократного повторения идентификации получим точки, попадающие в область, ограниченную эллипсом рассеивания (рис. 3).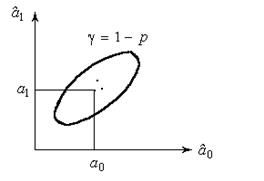

 дисперсионная функция имеет вид
дисперсионная функция имеет вид

 , где
, где 