
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Экспериментальной переходной функции
На практике реальные входные и выходные сигналы искажены шумами (помехами), что затрудняет непосредственное использование рассмотренных выше методов ТАУ. В этих случаях динамические характеристики ОУ аппроксимируются некоторыми функциями, причем коэффициенты в выражениях определяются путем обработки входных и выходных сигналов, исходя из критерия близости объекта и модели, задаваемого функционалом ошибки, причем предварительно производится сглаживание (фильтрация) сигналов. Задача идентификации распадается на две: выбор вида аппроксимирующих функций и подбор их параметров, причем стремятся получить желаемую точность при как можно меньшем числе функций. Описываемый подход, основанный на аппроксимации переходной функции или ИПФ, обладает еще и тем преимуществом, что позволяет получить сравнительно простые алгоритмы идентификации, в том числе и адаптивные. Из курса высшей математики известно, что абсолютно интегрируемая на интервале [0, T]функция f(t)может быть разложена по некоторой системе аппроксимирующих функций {f (t)}:
Вид этих функций выбирается по априорной информации об аппроксимируемой функции в соответствии с некоторыми требованиями: функции fn(t)должны быть интегрируемы, достаточно гладки и просто реализуемы на ЭВМ, система функций {fn(t)}должна быть линейно независимой, ортогональной и полной, гарантировать быстроту аппроксимации с увеличением их числа. В качестве системы функций используются тригонометрические (ряды Фурье), экспоненциальные, полиномы Лежандра, Лагерра, Чебышева, Эрмита, Якоби и другие. Коэффициенты аппроксимации выбираются таким образом, чтобы минимизировать некоторый заранее выбранный критерий приближения. Достаточно часто при исследовании динамических характеристик технических объектов искомая переходная функция искажена случайной помехой (шумом) x(t), то есть наблюдается
причем, как правило, Принципиально возможно усреднение y(t)по большому количеству реализаций. Поскольку x(t) есть стационарный случайный процесс (ССП), то
Для получения достоверных результатов число экспериментальных функций должно быть не менее 20, что является практически нереальным. В связи с этим на практике используются инженерные методы сглаживания (фильтрации) экспериментальной кривой, заданной равноотстоящими дискретными значениями y = y(t), где Известно много методов сглаживания: скользящим средним, скользящей медианой, экспоненциальным средним, рядами Фурье, многочленами Чебышева, сплайнами и т.п. Конкретный применяемый метод определяется как характером переходной функции и необходимой точностью, так и техническими возможностями исследователя. После выполнения операции сглаживания экспериментальная кривая аппроксимируется, например, выражением (16), а далее вычисляется передаточная функция ОУ.
Рис. 4. Вид экспериментальной переходной функции
Практическим примером такой идентификации является определение передаточной функции динамической системы (ДС) металлорежущего станка по экспериментальной переходной функции (рис. 4), полученной при врезании инструмента в заготовку [21]. Первоначально осуществляется фильтрация данных, а затем сглаженная кривая аппроксимируется выражением (16), причем реальный порядок характеристического уравнения ОУ определяется заданной ошибкой аппроксимации. Практически значение n не превышает 5-8. Коэффициенты pi являются корнями характеристического уравнения ДС. Передаточная функция ДС в этом случая равна:
Из (35) следует, что для нахождения выражения для W(p)необходимо определить 2n значений параметров Ci и pi. Для этого применяется специальный метод, основанный на использовании 2n значений экспериментальной переходной функции h(t) [22]. Идентификация ДС станка используется для нахождения целесообразного режима резания на станке по запасу устойчивости, определяемому по найденной передаточной функции. Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 658; Нарушение авторского права страницы
 . (32)
. (32) . (33)
. (33) имеет нормальный закон распределения с нулевым математическим ожиданием (МО), а спектральная плотность близка к постоянной в ограниченной полосе пропускания объекта, то есть имеет место ограниченный БШ. Определение по функции y(t), коэффициентов уравнения ОУ возможно лишь после соответствующей обработки экспериментальных данных, заключающейся в выделении истинной функции h(t).
имеет нормальный закон распределения с нулевым математическим ожиданием (МО), а спектральная плотность близка к постоянной в ограниченной полосе пропускания объекта, то есть имеет место ограниченный БШ. Определение по функции y(t), коэффициентов уравнения ОУ возможно лишь после соответствующей обработки экспериментальных данных, заключающейся в выделении истинной функции h(t). , тогда
, тогда (34)
(34) = ti+1 – ti, i = 0…n (рис. 4).
= ti+1 – ti, i = 0…n (рис. 4).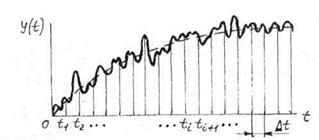
 . (35)
. (35)