
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Матричный метод решения системы линейных алгебраических уравнений. Формулы Крамера. Метод Гаусса
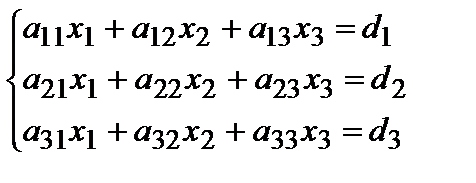
Рассмотрим систему, составленную из трех линейных алгебраических уравнений с тремя неизвестными.
Решением (2.1)называется система
- основная матрица системы (2.1)
- расширенная матрица (2.1)
система (2.1) может быть записана в матричном виде так: AX=D (6.1.15) X – неизвестная матрица-столбец. Введем вспомогательные определители:
Предполагая, что матрица A - невырожденная и умножая (2.5) слева и почленно на A-1, получим
Используя понятие равенства двух матриц, получим
Элементарными преобразованиями матрицы называются следующие преобразования:
Пример 6. 1.2. Найти матрицу, обратную матрице Обратную матрицу находим по формуле Вычислим определитель матрицы по правилу треугольника:
Определитель не равен нулю, следовательно, обратная матрица существует. Составляем матрицу из алгебраических дополнений (
Выполним проверку:
Получим: A-1× A=A× A-1=E. Следовательно, обратная матрица найдена верно. Ответ:
Пример 6.1.3. Решить систему линейных уравнений по формулам Крамера
Решение: Найдем главный определитель системы
Так как число уравнений и число неизвестных системы между собой равны m=n=3 и определитель отличен от нуля, система имеет единственное решение. Найдем вспомогательные определители:
Неизвестные находим по формулам Крамера:
Ответ:
Пример 6.1.4.. Решить систему линейных уравнений методом Гаусса
Решение. Метод Гаусса – это метод последовательного исключения неизвестных преобразованием данной системы линейных уравнений к эквивалентной. Преобразования уравнений системы заменяются преобразованием строк расширенной матрицы системы до приведения основной матрицы к треугольной или трапециевидной форме. Обнуление элементов выполняется элементарными преобразованиями матрицы(умножение строк на числа, отличные от нуля с последующим сложением).
Ответ:
Пример 6.1.5. Применить теорему Кронекера – Капели и найти все решения системы методом Гаусса
Решение. Однородная матрица всегда имеет тривиальное решение, в данном случае (0; 0; 0; 0), поэтому нас интересуют другие решения системы. Применяем метод Гаусса:
Так как размерности основной и расширенной матриц системы 3x4 и 3x5 соответственно, ранги этих матриц не могут превышать числа 3. Попробуем посмотреть, есть ли для этих матриц минор третьего порядка, отличный от нуля. Составим его из первых двух и четвертого столбца:
Решением системы будет множество четверок чисел Например, (0; 2; 2; 0), (0; -1; -1; 0), Ответ: Замечание. Обратите внимание, что тривиальное решение тоже задается этим множеством.
Пример 6. 1.6. Даны координаты векторов
Решение. Если векторы
Отсюда вытекает решение задачи: найти координаты вектора Решаем методом Гаусса:
Так как определитель треугольного вида равен произведению элементов, стоящих на главной диагонали, видим, что он отличен от нуля. Следовательно, векторы Найдем координаты вектора b в этом базисе
Следовательно, Ответ:
Аналитическая геометрия Прямая на плоскости Всякая прямая линия определяется в заданной прямоугольной декартовой системе координат Оху уравнением первой степени относительно переменных х и у. Ах + Ву + С=0 (6.2.1) общее уравнение прямой, гдеАи В - координаты одного из нормальных векторов этой прямой.
каноническое уравнение прямой, где (х0, у0) -координаты точки, черезкоторую проходит прямая, lи т-координаты направляющего вектора xCosa+yCosβ -p = 0 (6.2.3) нормированное уравнение прямой, где Cosa, Cosβ - координаты единичного вектора
у = кх + b (6.2. 4) уравнение с угловым коэффициентом к = tga, α - угол наклона прямой к оси Ох, b - величина отрезка, отсекаемого на оси Оу.
уравнение прямой, проходящей через две данные точки (х1, у1) и (х2 , у2).
параметрические уравнения прямой, проходящей через точку (хо, уо) в направлении вектора
уравнение прямой «в отрезках», где а и bвеличины отрезков отсекаемых прямой на осях охи оу соответственно. Взаимное расположение двух прямых, заданных уравнениями (1), (2), (3), вполне определяется взаимным расположением векторов с ними связанных, поэтому условия параллельности, ортогональности и угол между прямыми получены из соответствующих условий для векторов. Для прямых, заданных уравнениями вида (4), выпишем эти условия. Если y=k1х + b1и у = к2х + Ь2уравнения этих прямых, то k1 =k2–условие параллельности, (6.2.8) k1× k2=-1 –условие перпендикулярности, (6.2.9) Если дана прямая общим уравнением Aх + Ву + С=О, то его можно нормировать умножением на нормирующий множитель
где знак выбирается противоположным знаку свободного члена С из общего уравнения μ Ах + μ Bу + μ C = 0 Нормированное уравнение позволяет получить отклонение δ и расстояние dдля данной точки М0(х0, у0) от прямой по формуле δ = х0cosα + у0cosβ - ρ,
Пример6.2.1. Найти угол между прямыми
Решение.
тогда другой угол между прямыми 135°.
Пример 6.2.2. Найти проекцию точки Мо(4, 9) на прямую, проходящую через точки М1(3, 1) и М2(5, 2). Решение. Найдем уравнение прямой М1М2 по формуле (5)
откуда Получим b= 17. Точка пересечения заданной прямой и этого перпендикулярадаст проекцию Мона данную прямую. Решим систему:
Получим х= 7, у = 3. Пример 6.2.3. Найти расстояние между параллельными прямыми у=2х-З и у=2х + 5. Решение. На первой прямой найдем какую-нибудь точку. Пусть х =1, тогда у=-1. Получим точку Мо(1, -1). Приведем уравнение второй прямой к нормированному виду: 2x-y+5=0,
- нормированное уравнение. Тогда по формуле (6.2.12) получим
Плоскость Уравнение плоскости с нормальным вектором А(х -х0) + В(у - у0) + C(z - z0) = 0. (6.2.13) Из этого уравнения получается общее уравнение плоскости Ax + By + Cz+D=0, (6.2.14) представляющее собой уравнение первой степени относительно переменных x, y и z. Геометрически удобное уравнение в отрезках где а, b, с - величины отрезков, отсекаемых плоскостью на осях координатсоответственно. Нормированное уравнение плоскости xcosα + ycosβ + zcosg-ρ = 0, (6.2.16) где ρ - расстояние плоскости от начала координат; a, β, g - углы образованные единичным вектором нормали к плоскости (он направлен от начала координат к плоскости) с соответствующими осями координат. Если дана плоскость общим уравнением (6.2.14), то μ Ах + μ Dy + μ Сz+ μ D= О будет нормированным уравнением той же плоскости, если
где знак выбирается противоположным знаку D - свободного члена в общем уравнении. Нормированное уравнение (6.2.16) позволяет получить отклонение δ и расстояние d от заданной точки Мо(х0, у0, z0) до плоскости δ = x0cosα + y0cosβ + z0cosγ -ρ, (6.2.17) d = \ δ \. (6.2.18) Условия перпендикулярности, параллельности и угол между плоскостями совпадают с аналогичными условиями для векторов, нормальных к этим плоскостям. Прямая в пространстве Прямая в пространстве может быть задана как линия пересечения двух плоскостей
причем должно нарушаться хотя бы одно из равенств
чтобы эти плоскости пересекались. Другой способ задания прямой:
каноническими уравнениями, где М0(x0, у0, z0) - точка, через которую проходит прямая в направлении вектора Из (6.2.20) могут быть получены уравнения прямой, проходящей через две точки М1{x1, y1, z1) и M2(x2, y2, z2)
и параметрические уравнения прямой: Если прямая задана уравнениями (6.2.19), то можно получить канонические уравнения этой прямой, если взять какую-нибудь точку, задавая, например, х0и отыскивая соответствующие у0и z0из системы (6.2.19), и получить направляющий вектор прямой
Если прямая задана уравнениями (6.2.20), а плоскость общим уравнением (6.2.14), то условие параллельности прямой и плоскости Аl + Вт+Сп = 0, (6.2.23) а условие перпендикулярности
Пример 6.2.4. Привести уравнение прямой к каноническому виду. Решение. Найдем какую-нибудь точку на этой прямой. Пусть х = 0, тогда система примет вид
Отсюда y=-2,
Канонические уравнения прямой
Пример 6.2.5. Составить уравнения движения точки M(x, y, z), которая имеет начальное положение Мо(1; -2; 4), движется прямолинейно и равномерно в направлении вектора Решение.
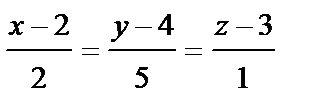
Пример 6.2.5. Найти расстояние точки М0(1; 2; 0) от прямой
Решение. Проведем через точку Моплоскость α, перпендикулярную данной прямой и найдем М1 - точку пересечения плоскости α с данной прямой. Тогда искомое расстояние будет расстоянием от Мо до М1. Для плоскости α воспользуемся уравнением вида (13), так как известна точка М0(1; 2; 0) на ней лежащая и нормальным вектором может служитьнаправляющий вектор прямой а= {2, 5, 1}. Получим 2(х -1) + 5(у - 2) + 1(z- 0) = 0, или 2x + 5y + z-12 = 0. Найдем точку пересечения плоскости α и данной прямой, решив систему из уравнений плоскости α и параметрических уравнений данной прямой:
Исключая x, y, z, найдем t=-0, 5. Тогда х=1, y=1, 5, z=2, 5. Точка М1(1; 1, 5; 2, 5). Расстояние М0М1:
Пример 6.2.6. Найти угол между прямой
и плоскостью х + 2у - 3z - 1 = 0. Решение. Рассмотрим нормальный вектор плоскости
Кривые второго порядка Канонические уравнения: эллипса гиперболы параболы Эксцентриситеты эллипса гиперболы параболы где rи d- расстояния любой точки параболы до фокуса и директрисы соответственно. Уравнение директрисы параболы Построение кривой в полярной системе координат Полярная система координат задается точкойО(полюсом), выходящим из нее лучом и единицей масштаба. Полярные координаты точки М - два числа ρ и φ, первое из которых ρ (полярный радиус) равно расстоянию точки М от полюсаО, а второе φ (полярный угол) - угол, на который нужно повернуть полярный луч против часовой стрелки до совмещения с лучом ОМ.
Обычно считают, что ρ и φ изменяются в пределах
чтобы соответствие между точками плоскости и полярными координатами было однозначным. Замечание. В задачах, связанных с перемещением точки по плоскости (в механике), удобнее отказаться от этих ограничений, когда естественно считать, что при вращении точки угол может быть и больше 2π, а при движении точки по прямой, проходящей через полюс, считать, что при переходе через полюс полярный радиус точки меняет знак на отрицательный.
Пример 6.2.7. Построить график функции ρ = 2 + 3cos φ.
Построение выполняем поточечное. Выяснив область определения функции(
Улитка Паскаля
При значениях Замечание 1. Если форма кривой неясна, берем промежуточные точки. Замечание 2. Наиболее часто встречающиеся кривые и их название приведены в справочнике [3]. Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 955; Нарушение авторского права страницы
 (6.1.11.)
(6.1.11.) из трех чисел, удовлетворяющая требованию: если в (2.1) вместо
из трех чисел, удовлетворяющая требованию: если в (2.1) вместо  и
и  подставить соответственно
подставить соответственно 
 и
и  , то получим три верных равенства (три тождества).
, то получим три верных равенства (три тождества). (6.1.12)
(6.1.12) (6.1.13)
(6.1.13) ;
;  ;
;  (6.1.14)
(6.1.14)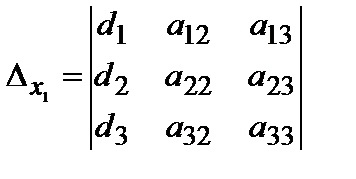


 –(6.1.16) матричный способ решения системы.
–(6.1.16) матричный способ решения системы.
 (6.1.17)
(6.1.17) (6.1.18)
(6.1.18) (6.1.19)
(6.1.19) . Проверить результат.
. Проверить результат. .
.
 ) и транспонируем ее.
) и транспонируем ее. ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  ;
;  .
. ·
·  =
=
 .
. ·
· 

 .
. .
.



 ;
;  .
. .
. .
.
 .
. .
. .
.

 .
. , так как определитель треугольного вида равен произведению элементов, стоящих на главной диагонали. Следовательно, ранги основной и расширенной матриц равны 3. По теореме Кронекера-Капелли данная система совместна. Так как число уравнений m=3 меньше числа неизвестных n=4, то она имеет бесчисленное множество решений. Закрепленных (базисных) переменных будет 3 (так как r=3), свободных переменных будет (n-r=4-3=1) одна. Минор, который мы составили выше, называется базисным, а переменные, входящие в него, базисными. Следовательно,
, так как определитель треугольного вида равен произведению элементов, стоящих на главной диагонали. Следовательно, ранги основной и расширенной матриц равны 3. По теореме Кронекера-Капелли данная система совместна. Так как число уравнений m=3 меньше числа неизвестных n=4, то она имеет бесчисленное множество решений. Закрепленных (базисных) переменных будет 3 (так как r=3), свободных переменных будет (n-r=4-3=1) одна. Минор, который мы составили выше, называется базисным, а переменные, входящие в него, базисными. Следовательно,  - базисные переменные, а
- базисные переменные, а  - свободная, то есть
- свободная, то есть  . Выполним обратный ход метода Гаусса:
. Выполним обратный ход метода Гаусса:  .
. , где
, где  - решения системы.
- решения системы. .
. и
и  в некотором базисе. Показать, что векторы
в некотором базисе. Показать, что векторы  образуют базис и найти координаты вектора
образуют базис и найти координаты вектора  ;
;  ;
;  ;
;  ;
;  .
. , то есть
, то есть .
. . Эта система будет иметь единственное решение, если ее основной определитель будет отличен от нуля.
. Эта система будет иметь единственное решение, если ее основной определитель будет отличен от нуля.
 .
. или b=(5; 0; -1; 2) в базисе
или b=(5; 0; -1; 2) в базисе 
 (6.2. 2)
(6.2. 2) .
.
 нормали прямой (он направлен из начала координат к прямой), р- расстояние прямой от начала координат
нормали прямой (он направлен из начала координат к прямой), р- расстояние прямой от начала координат  .
.
 (6.2.5)
(6.2.5) (6.2.6)
(6.2.6) = {1, т).
= {1, т). (6.2.7)
(6.2.7) -тангенс угла между прямыми ( 6.2.10)
-тангенс угла между прямыми ( 6.2.10) , (6.2.11)
, (6.2.11) . (6.2.12)
. (6.2.12) .
. ,
,  ,
,  . Ищем уравнение перпендикуляра к этой прямой, проходящего через точку Мов виде (4). Пользуясь условиемперпендикулярности кгк1=-1, найдем
. Ищем уравнение перпендикуляра к этой прямой, проходящего через точку Мов виде (4). Пользуясь условиемперпендикулярности кгк1=-1, найдем  . Так как координаты Модолжны удовлетворять искомому уравнению, то в уравнение у=-2x+bподставим координаты Мо: 9 =-2× 4+b.
. Так как координаты Модолжны удовлетворять искомому уравнению, то в уравнение у=-2x+bподставим координаты Мо: 9 =-2× 4+b. .
. ,
, 
 (лин.ед.)
(лин.ед.) = {А, В, С} и проходящей через точку M0(x0, y0, zo) имеет вид
= {А, В, С} и проходящей через точку M0(x0, y0, zo) имеет вид , (6.2.15)
, (6.2.15) ,
,  (6.2.19)
(6.2.19) ,
,  (6.2.20)
(6.2.20) = {1, т, п}. Тогда условия параллельности, перпендикулярности и угол междупрямыми могут быть получены как соответствующие условия для направляющих векторов этих прямых.
= {1, т, п}. Тогда условия параллельности, перпендикулярности и угол междупрямыми могут быть получены как соответствующие условия для направляющих векторов этих прямых. (6.2.21)
(6.2.21) . (6.2.22)
. (6.2.22)
 .
.
 .
. . Получим точку Мо(0; -2;
. Получим точку Мо(0; -2;  )Найдем направляющий вектор
)Найдем направляющий вектор

 = {2; 3; 6} со скоростью
= {2; 3; 6} со скоростью  ,
,  .
. Тогда
Тогда  . Искомые уравнения будут
. Искомые уравнения будут

 (лин.ед.).
(лин.ед.).
 = {1; 2; -3} и направляющий вектор прямой
= {1; 2; -3} и направляющий вектор прямой  = {2; 3; 5}. Косинус угла между этимивекторами равен синусу угла между прямой и плоскостью:
= {2; 3; 5}. Косинус угла между этимивекторами равен синусу угла между прямой и плоскостью:  ,
,  .
. ,
,  ,
,  ;
; 
 ,
, 
 ,
,  ;
;  .
.






 ,
,  ), задаемся для начала значениями φ в интервале [0, 2π ] и вычисляем соответствующие значения ρ:
), задаемся для начала значениями φ в интервале [0, 2π ] и вычисляем соответствующие значения ρ: 






 Выполним построение с помощью транспортира.
Выполним построение с помощью транспортира. полученные точки повторяются.
полученные точки повторяются.